लेख एक सरल लाइन फॉलोवर वाहन सर्किट, जिसे लाइन ट्रैकर वाहन के रूप में भी जाना जाता है, जटिल अर्डुइनो या माइक्रोकंट्रोलर्स का उपयोग किए बिना, केवल एक ऑप एम्प और कुछ अन्य घटकों का उपयोग करके बताता है।
एक लाइन अनुयायी वाहन क्या है
एक लाइन फॉलोअर वाहन स्वचालित निर्देशित वाहन (AGV) का एक रूप है जो एक सफेद लाइन का पता लगाकर चलता है जो जमीन पर खींची या एम्बेडेड होती है। डिटेक्टरों से संकेत मोटर चालित पहियों को स्वचालित रूप से लाइन के अनुसार मोड़ने और समायोजित करने की आज्ञा देते हैं, यह धारणा देते हुए कि वाहन लाइन का अनुसरण कर रहा है। इसलिए नाम लाइन अनुयायी।
मूल रूप से डिटेक्टर के रूप में हैं LDRs जैसे फोटो रेसिस्टर्स या अर्धचालक प्रकाश डिटेक्टरों जैसे फोटो डायोड या फोटो ट्रांजिस्टर ।
ऐसी एक जोड़ी प्रकाश डिटेक्टरों उपयोग किया जाता है जो सफेद रेखा से परावर्तित प्रकाश का पता लगाते हैं और एक ट्रांजिस्टरित सर्किट या ऑप amp आधारित तुलनाकर्ताओं को स्विच करते हैं, जो बदले में वाहन के पहिया मोटर्स को जमीन पर सफेद रेखा के घुमाव और घटता के अनुसार पैंतरेबाज़ी करने के लिए नियंत्रित करते हैं।
विंडो कंप्रेशर्स का उपयोग करना
प्रस्तावित लाइन फॉलोअर वाहन सर्किट में, हमने एक दो का उपयोग किया है ऑप amp तुलनाकर्ता संतुलनकारी अधिनियम में मोटर्स को उलझा रहा था।
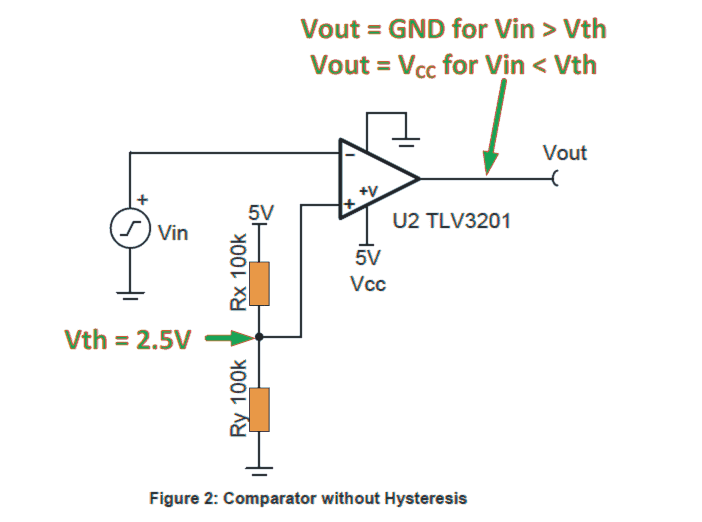
Op amps को विंडो के रूप में धांधली किया जाता है साझाकरण । जैसा कि नाम से पता चलता है, एक विंडो तुलनित्र डिटेक्टर से इनपुट सिग्नल की तुलना दो चरम वोल्टेज संदर्भों के साथ करता है जो 'विंडो' थ्रेसहोल्ड का गठन करते हैं। जब तक इनपुट सिग्नल स्तर इस 'विंडो' संदर्भ थ्रेसहोल्ड के भीतर होता है, दोनों ऑप एम्प का आउटपुट अपने आउटपुट में उच्च तर्क बनाए रखता है।
हालांकि, एक घटना में इनपुट सिग्नल संदर्भ थ्रेशोल्ड को पार करने के लिए जाता है, प्रासंगिक op amp आउटपुट कम हो जाता है, जिसके परिणामस्वरूप op amps से आउटपुट का विरोध होता है। यह असंतुलन उत्पादन उपकरणों को उचित रूप से लोड को स्विच करके स्थिति को सही करने का संकेत देता है।
सर्किट कैसे काम करता है
नीचे दिए गए लाइन फॉलोअर वाहन के सर्किट आरेख का हवाला देते हुए, हम विंडो ऑप्टर के रूप में कॉन्फ़िगर किए गए दो सेप एम्प देख सकते हैं।

Op amps IC LM358 या LM324 से हो सकता है
ऊपरी ऑप amp को ऊपरी सीमा सीमा को नियंत्रित करने के लिए वायर्ड किया गया है, जबकि निचला ऑप amp निचले थ्रेसहोल्ड सीमा को नियंत्रित करने के लिए जुड़ा हुआ है।
ऑप amp A1 के इनवर्टिंग इनपुट और ऑप amp A2 के गैर-इनवर्टिंग इनपुट को निश्चित संदर्भ वोल्टेज के साथ जोड़ा जाता है
सेशन amp A1 का नॉन-इनवर्टिंग इनपुट, और ऑप amp A2 के इनवर्टिंग इनपुट को एक साथ बांधा जाता है और लाइट डिटेक्टर से इनपुट सिग्नल में विविधता को महसूस करने के लिए उपयोग किया जाता है।
दो लाइट डिपेंडेंट रेसिस्टर्स, LDR1 और LDR2 जो लाइट सेंसिटिव डिवाइसेस की तरह काम करते हैं, उन्हें लाइट डिटेक्टर के रूप में तैनात किया जाता है, जैसे कि वे सफेद लाइन से परावर्तित लाइट को समान रूप से प्राप्त करते हैं।
जब तक एलडीआर पर प्रकाश पर्याप्त रूप से उच्च और समान होता है, A1 का पिन 3 अपने पिन 2 से अधिक रहता है, क्योंकि LDR1 सकारात्मक रेखा के साथ जुड़ा हुआ है। इसके कारण इसका आउटपुट अधिक हो जाता है।
इसी तरह, A2 का pin6 ग्राउंड लाइन के साथ LDR2 कनेक्शन के कारण इसके पिन 5 से कम आयोजित किया जाता है, और यह A2 के आउटपुट को उच्च रहने में सक्षम बनाता है।
दूसरे शब्दों में, जब LDRs समान रूप से जलाए जाते हैं, तो दोनों सेशन amps के गैर-इनवर्टिंग (+) इनपुट को उनके inverting (-) इनपुट से अधिक रखा जाता है, जिससे उनके आउटपुट उच्च होते हैं।
दोनों आउटपुट उच्च के साथ, ट्रांजिस्टर चालक संबंधित मोटर्स को समान रूप से चालू रखते हैं, जो वाहन को एक सीधी रेखा पर सुचारू रूप से चलाने की अनुमति देता है।
कैसे वाहन लाइन का अनुसरण करता है
जब एक घुमावदार सफेद रेखा का सामना करना पड़ता है, तो एलडीआर में से एक सर्किट के बिंदु ए पर प्रकाश में अंतर पैदा करने वाली रेखा से भटक जाता है। यह बाद में प्रासंगिक ऑप आउटपुट को कम करने और संबंधित मोटर के क्षणिक ठहराव का कारण बनता है।
इस स्थिति में, दूसरी तरफ की मोटर जो अभी भी चालू है, वाहन को लाइन के झुकने वाले कोण की ओर मुड़ने के लिए मजबूर करती है, जो सफेद रेखा के प्रबुद्ध क्षेत्र में छायांकित LDR को वापस लाती है। जब ऐसा होता है तो दोनों मोटर्स फिर से चालू हो जाते हैं जिससे वाहन सामान्य रूप से चल सकता है।
झुकने वाली सफेद लाइनों से हल्की विविधताओं के जवाब में बाईं / दाईं मोटरों पर स्विच करने पर उपरोक्त स्वचालित ON / OFF वाहन को सफेद लाइन के अनुसार समायोजन और पैंतरेबाज़ी रखने के लिए मजबूर करता है।
वाहन का निर्माण कैसे करें
मेरे पहले के एक पोस्ट में हमने जाना कि कैसे सरल रिमोट नियंत्रित वाहन एक आयताकार बोर्ड के पीछे के किनारे से जुड़ी मोटरों के सिर्फ एक जोड़े का उपयोग करके बनाया जा सकता है, और बोर्ड के सामने किनारे पर डमी पहियों की जोड़ी।

प्रस्तावित लाइन फॉलोअर वाहन सर्किट के लिए भी, हम वाहन के लिए एक समान निर्माण को नियोजित करते हैं, जैसा कि उपरोक्त आंकड़े में दर्शाया गया है।
यह व्यवस्था बहुत सरल लगती है, पीछे के पहिए मोटरों से जुड़े होते हैं जो ऑप amp आउटपुट में ट्रांजिस्टर चालकों द्वारा नियंत्रित होते हैं।
जब वाहन लाइन से भटक जाता है, तो LDRs पर प्रकाश स्तर में अंतर से संबंधित मोटर को बंद करते हुए, किसी एक opps पर स्विच हो जाता है।
यह विपरीत पक्ष की मोटर को चालू करता है, जो कि रुकी हुई मोटर की ओर मुड़ने के लिए चालू है, जिसका अर्थ है कि यदि बाईं ओर की मोटर को ब्रेक किया गया है, तो वाहन उसी दिशा में झुकते हुए, समायोजन करते हुए, बाईं ओर मुड़ने के लिए मजबूर हो जाएगा।
इससे यह भी पता चलता है कि op amp आउटपुट के साथ बाएं / दाएं मोटर एकीकरण को उचित रूप से किया जाना चाहिए जैसे कि लाइन की झुकने की दिशा और जिस मोटर को रोका जा रहा है वह वाहन के एक ही तरफ हो।
कैसे LDRs की स्थिति के लिए
चूंकि दो LDR (LDR1 और LDR2) को समान रूप से सफेद रेखा से परावर्तित प्रकाश का अर्थ माना जाता है, इसलिए उनका झुकाव रेखा की लंबाई के लंबवत होना चाहिए, जैसा कि नीचे दिखाया गया है।

यहाँ, हमने एक ही रास्ते में एक निर्धारित डाउन लाइन का अनुसरण करते हुए वाहन को दाईं से बाईं ओर चलने के लिए माना है।
एलडीआर की कुल चौड़ाई लाइन की चौड़ाई के भीतर होनी चाहिए।
एलडीआर और एलईडी को वाहन के निचले सतह पर स्थापित किया जाना चाहिए, और रियर व्हील सेट के नीचे, अधिमानतः पीछे की तरफ।
संकेतित एलईडी एक सफेद एलईडी है जिसमें एक श्रृंखला 1K रोकनेवाला है। इसे LDRs और केंद्र के पास स्थित किया जाना चाहिए, यह सुनिश्चित करते हुए कि LDR से प्रकाश सीधे LDRs तक नहीं पहुंचता है, इसके बजाय प्रकाश को उनके नीचे सफेद रेखा से प्रतिबिंब द्वारा LDRs तक पहुंचना चाहिए।
मोटर चश्मा
मोटर्स किसी भी स्थायी चुंबक ब्रश प्रकार हो सकता है, लेकिन यह सुनिश्चित करने के लिए एक गियर बॉक्स के साथ सुसज्जित किया जाना चाहिए कि वाहन की गति उचित रूप से धीमी और स्थिर है।
मोटर की शक्ति रेटिंग उस भार के अनुसार होनी चाहिए जिसे वाहन को ले जाना है। कुछ व्यावहारिक प्रयोग के जरिए इसका परीक्षण किया जा सकता है।
स्थापित कैसे करें
इस लाइन फॉलोअर वाहन सर्किट को स्थापित करने के लिए, आपको एक सपाट सतह पर चित्रित सफेद लाइन की एक छोटी पट्टी या सपाट सतह पर चिपके सफेद टेप की व्यवस्था करनी होगी।
लाइन के ऊपर सिस्टम (पहियों के बिना) को रखें, जैसा कि पिछले आरेख में इंगित किया गया है, जैसे कि एलडीआर और एलईडी सही ढंग से लाइन की चौड़ाई के अंदर समायोजित किया जाता है।
बिजली चालू करें, सफेद एलईडी को उज्ज्वल रूप से इसके तहत क्षेत्र को रोशन करना चाहिए। दोनों प्रीसेट को तब तक एडजस्ट करें, जब तक दोनों मोटर्स एक साथ ऑन न हो जाएं।
अब इकाई को दाईं ओर थोड़ा सा स्थानांतरित करें ताकि LDR1 सफेद रेखा से बाहर निकल जाए।
बायां मोटर बंद होना चाहिए। यदि यह तब तक P1 को समायोजित नहीं करता है जब तक कि बाईं मोटर बस बंद न हो जाए।
इसके बाद, यूनिट को बाईं ओर थोड़ा घुमाएं ताकि LDR2 सफेद लाइन से बाहर निकल जाए। यह सही पक्ष मोटर को रोकना चाहिए। यदि यह तब 10k पूर्व निर्धारित को समायोजित नहीं करता है जब तक कि दाहिनी ओर की मोटर बस बंद न हो जाए।
यह सेट अप प्रक्रियाओं को पूरा करेगा और अब आप मोटरों पर पहियों को स्थापित कर सकते हैं और इस निर्देशित वाहन का उपयोग स्वचालित रूप से जमीन पर एक निर्धारित ट्रैक का पालन करने के लिए कर सकते हैं।
व्हाइट लाइन बनाम ब्लैक लाइन
प्रस्तावित लाइन फॉलोअर वाहन प्रणाली एक सफेद लाइन पर आधारित है, जो कि काली लाइन के बजाय जमीन पर एम्बेडेड है। काली रेखा के बजाय सफेद रेखा का उपयोग करने का लाभ इस प्रकार है:
काली रेखा की तुलना में सफेद रेखा अधिक सुरुचिपूर्ण और सभ्य दिखती है।
व्हाइट लाइन आधारित लाइन फॉलोअर कुल अंधेरे या मंद परिवेश रोशनी में भी काम कर सकते हैं। लाइट पर आधारित डिजाइनों को सामान्य रूप से वाहन को चालू रखने के लिए बाहरी रोशनी की आवश्यकता होती है।
एक सफेद लाइन आधारित एजीवी टाइल रंग की परवाह किए बिना अधिक सटीक रूप से काम करता है, टाइलों को छोड़कर जो सफेद लाइन के रंग के लिए बेहद सफेद या समकक्ष हैं।
वाहन को एक ब्लैक लाइन अनुयायी में परिवर्तित करना
उपर्युक्त फायदों के बावजूद, यदि उपयोगकर्ता वाहन को एक काली रेखा का अनुसरण करना पसंद करता है, तो प्रस्तावित डिजाइन में कुछ त्वरित संशोधनों के माध्यम से ऐसा करने के लिए सिस्टम को आसानी से रूपांतरित किया जा सकता है।
उपयोगकर्ता सिर्फ प्रीसेट के साथ op amps के इनपुट पिन कनेक्शन को इंटरचेंज या स्वैप करता है, और LDRs के साथ जुड़े एलईडी को हटाता है।
पिछला: 50 वाट साइन वेव यूपीएस सर्किट अगला: बेसिक इलेक्ट्रॉनिक सर्किट समझाया गया - इलेक्ट्रॉनिक्स के लिए शुरुआती गाइड