18 की अवधि मेंवेंशताब्दी में, डीसी मोटर्स का विकास हुआ था। डीसी मोटर्स के विकास में व्यापक रूप से वृद्धि हुई है और वे कई उद्योगों में महत्वपूर्ण रूप से लागू होते हैं। 1800 के शुरुआती समय में और वर्ष 1832 में किए गए संवर्द्धन के साथ, डीसी मोटर्स को शुरू में ब्रिटिश शोधकर्ता स्टीफन द्वारा विकसित किया गया था। उन्होंने डीसी मोटर के प्रारंभिक कम्यूटेटर प्रकार का आविष्कार किया, जहां यह मशीनरी को अनुकरण करने की क्षमता भी है। लेकिन किसी को आश्चर्य हो सकता है कि डीसी मोटर की कार्यक्षमता क्या है और डीसी मोटर गति नियंत्रण के बारे में जानना क्यों महत्वपूर्ण है। तो, यह लेख स्पष्ट रूप से इसके संचालन और विभिन्न गति नियंत्रण तकनीकों की व्याख्या करता है।
डीसी मोटर क्या है?
एक डीसी मोटर को सीधे विद्युत प्रवाह का उपयोग करके संचालित किया जाता है जहां यह प्राप्त विद्युत ऊर्जा को यांत्रिक ऊर्जा में बदल देता है। यह डिवाइस में एक घूर्णी परिवर्तन को ट्रिगर करता है और इस प्रकार कई डोमेन में विभिन्न अनुप्रयोगों को संचालित करने की शक्ति प्रदान करता है।
डीसी मोटर की गति नियंत्रण मोटर की सबसे उपयोगी विशेषताओं में से एक है। मोटर की गति को नियंत्रित करके, आप आवश्यकताओं के अनुसार मोटर की गति को भिन्न कर सकते हैं और आवश्यक ऑपरेशन प्राप्त कर सकते हैं।
गति नियंत्रण तंत्र कई मामलों में लागू होता है जैसे रोबोट वाहनों की आवाजाही को नियंत्रित करना, कागज मिलों में मोटरों की आवाजाही और लिफ्ट में मोटरों की आवाजाही डीसी मोटर्स के विभिन्न प्रकार उपयोग किया जाता है।
डीसी मोटर का कार्य सिद्धांत
एक साधारण डीसी मोटर इस सिद्धांत पर काम करती है कि जब एक करंट-वहन करने वाला कंडक्टर एक में रखा जाए चुंबकीय विश्वासयोग्य डी, यह एक यांत्रिक शक्ति का अनुभव करता है। एक व्यावहारिक डीसी मोटर में, आर्मेचर कंडक्टर ले जाने वाला विद्युत प्रवाह होता है और क्षेत्र एक चुंबकीय क्षेत्र प्रदान करता है।
जब कंडक्टर (आर्मेचर) को करंट के साथ आपूर्ति की जाती है, तो यह अपना चुंबकीय प्रवाह पैदा करता है। चुंबकीय प्रवाह या तो एक दिशा में क्षेत्र वाइंडिंग के कारण चुंबकीय प्रवाह को जोड़ता है या क्षेत्र के घुमाव के कारण चुंबकीय प्रवाह को रद्द करता है। अन्य दिशाओं की तुलना में एक दिशा में चुंबकीय प्रवाह का संचय कंडक्टर पर एक बल लगाता है, और इसलिए, यह घूमना शुरू कर देता है।
फैराडे के विद्युत चुम्बकीय प्रेरण के नियम के अनुसार, कंडक्टर की घूर्णन क्रिया एक उत्पादन करती है ईएमएफ । यह EMF, लेनज़ के नियम के अनुसार, कारण का विरोध करने के लिए जाता है, अर्थात्, आपूर्ति की गई वोल्टेज। इस प्रकार, एक डीसी मोटर में पीछे ईएमएफ के कारण अलग-अलग लोड के मामले में अपने टोक़ को समायोजित करने की एक बहुत ही विशेष विशेषता है।
क्यों डीसी मोटर गति नियंत्रण महत्वपूर्ण है?
मशीन में गति नियंत्रण मोटर के रोटेशन की गति पर प्रभाव दिखाता है जहां मशीन की कार्यक्षमता पर यह सीधा प्रभाव पड़ता है और प्रदर्शन के परिणाम और परिणाम के लिए इतना महत्वपूर्ण है। ड्रिलिंग के समय, हर तरह की सामग्री की अपनी घूर्णी गति होती है और यह ड्रिल आकार के आधार पर भी बदलती है।
पंप प्रतिष्ठानों के परिदृश्य में, थ्रूपुट दर में बदलाव होगा और इसलिए एक कन्वेयर बेल्ट को डिवाइस की कार्यात्मक गति के साथ सिंक करने की आवश्यकता है। ये कारक या तो प्रत्यक्ष या अप्रत्यक्ष रूप से मोटर की गति पर निर्भर होते हैं। इस वजह से, एक को डीसी मोटर गति पर विचार करना चाहिए और विभिन्न प्रकार के गति नियंत्रण विधियों का पालन करना चाहिए।
डीसी मोटर गति नियंत्रण या तो मैन्युअल रूप से कार्यकर्ता द्वारा या किसी भी स्वचालित नियंत्रण उपकरण का उपयोग करके किया जाता है। यह गति सीमा के विपरीत लगता है जहां शाफ्ट लोड में भिन्नता के कारण गति में प्राकृतिक भिन्नता का विरोध करते हुए गति विनियमन होना चाहिए।
स्पीड कंट्रोल का सिद्धांत
उपरोक्त आंकड़े से, एक साधारण का वोल्टेज समीकरण डीसी यंत्र है
वी = इब + इरा
वी आपूर्ति की गई वोल्टेज है, ईबी वापस ईएमएफ है, आईए आर्मेचर करंट है, और रा आर्मेचर प्रतिरोध है।
हम पहले से ही जानते हैं
ईबी = (पीओएनएनजेड) / 60 ए।
पी - डंडे की संख्या,
निरंतर
Z - कंडक्टर की संख्या
एन- मोटर की गति
वोल्टेज समीकरण में ईबी के मूल्य को प्रतिस्थापित करते हुए, हम प्राप्त करते हैं
V = (PORNZ) / 60A) + IaRa
या, वी - इरा = (पीओएनएनजेड) / 60 ए
अर्थात, N = (PZ / 60A) (V - IaRa) / ø
उपरोक्त समीकरण को इस प्रकार भी लिखा जा सकता है:
N = K (V - IaRa) / ø, K एक स्थिर है
इसका तात्पर्य तीन बातों से है:
- वोल्टेज की आपूर्ति के लिए मोटर की गति सीधे आनुपातिक है।
- मोटर की गति आर्मेचर वोल्टेज ड्रॉप के विपरीत आनुपातिक है।
- क्षेत्र निष्कर्षों के कारण मोटर की गति प्रवाह के व्युत्क्रमानुपाती होती है
इस प्रकार, डीसी मोटर की गति को तीन तरीकों से नियंत्रित किया जा सकता है:
- आपूर्ति वोल्टेज को अलग करके
- फ्लक्स अलग करके, और क्षेत्र वाइंडिंग के माध्यम से वर्तमान को अलग करके
- आर्मेचर वोल्टेज को अलग करके, और आर्मेचर प्रतिरोध को अलग करके
डीसी मोटर स्पीड कंट्रोल की कई तकनीकें
जैसा कि दो प्रकार की डीसी मोटर्स हैं, यहां हम स्पष्ट रूप से डीसी श्रृंखला और दोनों की गति नियंत्रण विधियों पर चर्चा करेंगे अलग धकेलना मोटर्स।
श्रृंखला प्रकारों में डीसी मोटर गति नियंत्रण
इसे दो प्रकारों में वर्गीकृत किया जा सकता है और वे हैं:
- आर्मेचर नियंत्रित तकनीक
- क्षेत्र नियंत्रित तकनीक
आर्मेचर नियंत्रित तकनीक को आगे तीन प्रकारों में वर्गीकृत किया गया है
- आर्मेचर नियंत्रित प्रतिरोध
- शस्त्रयुक्त नियंत्रण
- आर्मेचर टर्मिनल वोल्टेज
आर्मेचर नियंत्रित प्रतिरोध
यह तकनीक सबसे व्यापक रूप से नियोजित है जहां विनियमन प्रतिरोध में मोटर आपूर्ति के साथ श्रृंखला कनेक्शन है। नीचे की तस्वीर यह बताती है।

आर्मेचर रेजिस्टेंस कंट्रोल
डीसी श्रृंखला मोटर के नियंत्रण प्रतिरोध में होने वाली बिजली हानि को अनदेखा किया जा सकता है क्योंकि प्रकाश विनियमन परिदृश्यों के समय गति को कम करने के लिए इस विनियमन तकनीक का उपयोग लंबी अवधि के लिए किया जाता है। यह लगातार टोक़ के लिए एक लागत प्रभावी तकनीक है और मुख्य रूप से ड्राइविंग क्रेन, ट्रेनों और अन्य वाहनों में लागू की जाती है।
शेन्डेड आर्मेचर कंट्रोल
यहां, रिओस्तात दोनों श्रृंखला में होगा और आर्मेचर के साथ शंटिंग कनेक्शन होगा। वोल्टेज स्तर में एक बदलाव होगा जो आर्मेचर पर लागू होता है और यह श्रृंखला को बदलकर भिन्न होता है रिओस्तात । जबकि एक्सकेशन करंट में बदलाव शंट रिओस्टेट को बदलने से होता है। डीसी मोटर में गति को नियंत्रित करने की यह तकनीक गति विनियमन प्रतिरोधों में महत्वपूर्ण बिजली के नुकसान के कारण इतनी महंगी नहीं है। गति को कुछ हद तक नियंत्रित किया जा सकता है लेकिन गति के सामान्य स्तर से ऊपर नहीं।

शेन्डेड आर्मेचर डीसी मोटर स्पीड कंट्रोल मेथड
आर्मेचर टर्मिनल वोल्टेज
एक डीसी श्रृंखला मोटर की गति को एक अलग-अलग आपूर्ति वोल्टेज का उपयोग करके मोटर को बिजली की आपूर्ति के माध्यम से भी किया जा सकता है, लेकिन यह दृष्टिकोण महंगा है और बड़े पैमाने पर लागू नहीं है।
क्षेत्र नियंत्रित तकनीक को आगे दो प्रकारों में वर्गीकृत किया गया है:
- फील्ड डायवर्टर
- टेप किए गए क्षेत्र का नियंत्रण (टैप फील्ड नियंत्रण)
फील्ड डायवर्टर तकनीक
यह तकनीक एक डायवर्टर का उपयोग करती है। श्रृंखला के पार क्षेत्र में मोटर की धारा के कुछ भाग को प्रवाहित करके क्षेत्र के पार प्रवाह दर को कम किया जा सकता है। डायमीटर का प्रतिरोध जितना कम होता है, फील्ड करंट उतना ही कम होता है। यह तकनीक सामान्य श्रेणी की गति से अधिक के लिए उपयोग की जाती है और इसे इलेक्ट्रिक ड्राइव पर लागू किया जाता है जहां लोड में कमी होने पर गति बढ़ जाती है।

फील्ड डायवर्टर डीसी मोटर स्पीड कंट्रोल
टेप फील्ड का नियंत्रण
यहाँ भी, प्रवाह में कमी के साथ, गति में वृद्धि की जाएगी और यह उस क्षेत्र घुमावदार को कम करके पूरा किया जाता है जहाँ से करंट का प्रवाह होता है। यहां, फील्ड वाइंडिंग में टैपिंग की संख्या को निकाल लिया जाता है और इस तकनीक का उपयोग इलेक्ट्रिक ट्रैक्शंस में किया जाता है।
डीसी शंट मोटर का स्पीड कंट्रोल
इसे दो प्रकारों में वर्गीकृत किया जा सकता है और वे हैं:
- क्षेत्र नियंत्रित तकनीक
- आर्मेचर नियंत्रित तकनीक
डीसी शंट मोटर के लिए फील्ड कंट्रोल विधि
इस विधि में, मोटर की गति को अलग करने के लिए क्षेत्र वाइंडिंग के कारण चुंबकीय प्रवाह भिन्न होता है।
चूँकि चुंबकीय प्रवाह, क्षेत्र घुमावदार के माध्यम से बहने वाली धारा पर निर्भर करता है, इसलिए इसे क्षेत्र की घुमावदार के माध्यम से अलग-अलग करके भिन्न किया जा सकता है। फ़ील्ड घुमावदार रोकनेवाला के साथ एक श्रृंखला में एक चर रोकनेवाला का उपयोग करके इसे प्राप्त किया जा सकता है।
प्रारंभ में, जब चर अवरोधक को इसकी न्यूनतम स्थिति में रखा जाता है, तो रेटेड आपूर्ति वोल्टेज के कारण रेटेड वर्तमान प्रवाह क्षेत्र के माध्यम से प्रवाहित होता है, और परिणामस्वरूप गति सामान्य रखी जाती है। जब प्रतिरोध धीरे-धीरे बढ़ाया जाता है, तो फ़ील्ड वाइंडिंग के माध्यम से वर्तमान कम हो जाता है। यह बदले में उत्पादित प्रवाह को कम करता है। इस प्रकार, मोटर की गति अपने सामान्य मूल्य से परे बढ़ जाती है।
डीसी शंट मोटर के लिए आर्मेचर रेसिस्टेंस कंट्रोल विधि
इस विधि से, आर्मेचर प्रतिरोध को नियंत्रित करके आर्मेचर प्रतिरोध को नियंत्रित किया जा सकता है ताकि आर्मेचर पर वोल्टेज ड्रॉप को नियंत्रित किया जा सके। यह विधि आर्मेचर के साथ श्रृंखला में एक चर अवरोधक का भी उपयोग करती है।
जब चर अवरोधक अपने न्यूनतम मूल्य तक पहुंच जाता है, तो आर्मेचर प्रतिरोध एक सामान्य पर होता है, और इसलिए, आर्मेचर वोल्टेज गिरता है। जब प्रतिरोध मूल्य धीरे-धीरे बढ़ाया जाता है, तो आर्मेचर में वोल्टेज कम हो जाता है। यह बदले में मोटर की गति में कमी की ओर जाता है।
यह विधि अपनी सामान्य सीमा से नीचे की मोटर की गति को प्राप्त करती है।
डीसी शंट मोटर (वार्ड लियोनार्ड विधि) के लिए आर्मेचर वोल्टेज नियंत्रण विधि
वार्ड लियोनार्ड तकनीक डीसी मोटर गति नियंत्रण सर्किट इस प्रकार दिखाया गया है:
उपरोक्त तस्वीर में, एम मुख्य मोटर है जहां इसकी गति को विनियमित किया जाना है और जी व्यक्तिगत रूप से उत्साहित डीसी जनरेटर से मेल खाती है जहां यह तीन-चरण मोटर का उपयोग करके संचालित होता है और यह या तो तुल्यकालिक या प्रेरण मोटर हो सकता है। डीसी जनरेटर और एसी संचालित मोटर संयोजन के इस पैटर्न को एम-जी सेट कहा जाता है।
जनरेटर वोल्टेज क्षेत्र के जनरेटर के क्षेत्र को बदलकर विविध है। यह वोल्टेज स्तर जब डीसी मोटर के आर्मेचर अनुभाग को प्रदान किया जाता है और फिर एम विविध होता है। मोटर क्षेत्र के प्रवाह को स्थिर रखने के लिए, मोटर क्षेत्र की धारा को स्थिर बनाए रखना होगा। जब मोटर की गति को नियंत्रित किया जाता है, तो मोटर के लिए आर्मेचर करंट को रेटेड स्तर के समान होना चाहिए।
प्रदत्त फ़ील्ड करंट अलग होगा ताकि वोल्टेज का आर्मेचर स्तर to 0 'से रेटेड स्तर तक भिन्न हो। चूंकि गति विनियमन रेटेड वर्तमान से मेल खाती है और मोटर के लगातार क्षेत्र प्रवाह के साथ और क्षेत्र प्रवाह तब तक होता है जब तक कि रेटेड गति प्राप्त नहीं हो जाती। और जैसा कि बिजली गति और टोक़ का उत्पाद है और इसका गति का प्रत्यक्ष अनुपात है। इसके साथ, जब सत्ता में वृद्धि होती है, तो गति बढ़ जाती है।
उपर्युक्त दोनों विधियाँ वांछनीय सीमा में गति नियंत्रण प्रदान नहीं कर सकती हैं। इसके अलावा, फ्लक्स नियंत्रण विधि कम्यूटेशन को प्रभावित कर सकती है, जबकि आर्मेचर नियंत्रण विधि में आर्मेचर के साथ श्रृंखला में एक रोकनेवाला के उपयोग के कारण भारी बिजली नुकसान शामिल है। इसलिए, एक अलग विधि अक्सर वांछनीय है - वह जो मोटर की गति को नियंत्रित करने के लिए आपूर्ति वोल्टेज को नियंत्रित करता है।
नतीजतन, वार्ड लियोनार्ड तकनीक के साथ, समायोज्य शक्ति ड्राइव और टोक़ के निरंतर मूल्य को गति के स्तर से न्यूनतम आधार गति के स्तर तक प्राप्त किया जाता है। फील्ड फ्लक्स रेगुलेशन तकनीक मुख्य रूप से तब नियोजित होती है, जब गति का स्तर बेस स्पीड से अधिक हो।
यहां, कार्यक्षमता में, आर्मेचर करंट को एक स्थिर स्तर पर निर्दिष्ट मूल्य पर रखा जाता है और जनरेटर का वोल्टेज मान स्थिर रहता है। ऐसी विधि में, फ़ील्ड वाइंडिंग को एक निश्चित वोल्टेज प्राप्त होता है, और आर्मेचर को एक चर वोल्टेज मिलता है।
वोल्टेज नियंत्रण विधि की ऐसी ही एक तकनीक में आर्मेचर को एक वैरिएबल वोल्टेज प्रदान करने के लिए स्विचगियर मैकेनिज्म का उपयोग शामिल है, और दूसरा एक एसी मोटर-चालित जेनरेटर का उपयोग आर्मेचर को चर वोल्टेज प्रदान करने के लिए करता है। वार्ड-लियोनार्ड सिस्टम ) का है।
वार्ड लियोनार्ड मेथो के फायदे और नुकसान हिम्मत:
डीसी मोटर गति नियंत्रण के लिए वार्ड लियोनार्ड तकनीक का उपयोग करने के लाभ इस प्रकार हैं:
- दोनों दिशाओं में, एक विस्तारित सीमा के लिए एक चिकनी तरीके से डिवाइस की गति को नियंत्रित कर सकता है
- इस तकनीक में आंतरिक ब्रेकिंग क्षमता है
- अनुगामी प्रतिक्रियाशील वाल्ट-एम्परेज को ड्राइव के माध्यम से प्रतिसंतुलित किया जाता है और बड़े पैमाने पर उत्साहित सिंक्रोनस मोटर ड्राइव के रूप में कार्य करता है इसलिए पावर फैक्टर में वृद्धि होगी
- जब एक चमकता लोड होता है, तो ड्राइव मोटर होता है इंडक्शन मोटर एक फ्लाइव्हील होना जिसका उपयोग फ्लैशिंग लोड को न्यूनतम स्तर तक कम करने के लिए किया जाता है
वार्ड लियोनार्ड तकनीक के नुकसान हैं:
- जैसे कि इस तकनीक में मोटर और जनरेटर का एक सेट है, लागत अधिक है
- डिवाइस डिजाइन करने के लिए जटिल है और इसमें हेवीवेट भी है
- स्थापना के लिए अधिक स्थान चाहिए
- नियमित रखरखाव की आवश्यकता है और आधार लागत-प्रभावी नहीं है
- भारी नुकसान होगा और इसलिए सिस्टम की दक्षता कम हो जाती है
- अधिक शोर उत्पन्न होता है
और यह वार्ड लियोनार्ड विधि के आवेदन डीसी मोटर में गति को नियंत्रित करना सुचारू है। कुछ उदाहरण हैं मेरा खुर, पेपर मिल, लिफ्ट, रोलिंग मिल, और क्रेन।
इन दो तकनीकों के अलावा, सबसे व्यापक रूप से इस्तेमाल की जाने वाली तकनीक है PWM का उपयोग कर डीसी मोटर की गति नियंत्रण एक डीसी मोटर की गति नियंत्रण प्राप्त करने के लिए। पीडब्लूएम में मोटर पर लागू वोल्टेज को नियंत्रित करने के लिए मोटर चालक को अलग-अलग चौड़ाई के दालों का आवेदन शामिल है। यह विधि बहुत कारगर साबित होती है क्योंकि बिजली की हानि कम से कम रखी जाती है, और इसमें किसी भी जटिल उपकरण का उपयोग शामिल नहीं है।

वोल्टेज नियंत्रण विधि
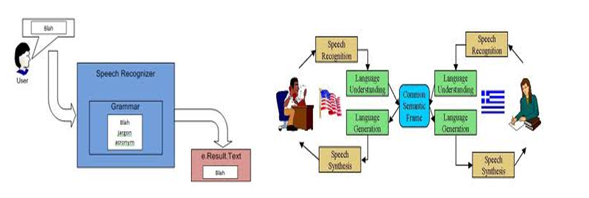
उपरोक्त ब्लॉक आरेख एक सरल का प्रतिनिधित्व करता है इलेक्ट्रिक मोटर गति नियंत्रक । जैसा कि उपरोक्त ब्लॉक आरेख में दर्शाया गया है, मोटर चालक को PWM सिग्नल खिलाने के लिए एक माइक्रोकंट्रोलर का उपयोग किया जाता है। मोटर चालक एक L293D IC है जिसमें मोटर को चलाने के लिए H- ब्रिज सर्किट होते हैं।
पीडब्लूएम को मोटर के लागू वोल्टेज को नियंत्रित करने के लिए मोटर चालक आईसी के सक्षम पिन पर लगाए गए दालों को अलग करके प्राप्त किया जाता है। पुल्क की भिन्नता माइक्रोकंट्रोलर द्वारा पुशबुटन से इनपुट सिग्नल के साथ की जाती है। यहाँ, दो पुशबट्टन प्रदान किए जाते हैं, प्रत्येक घटते हुए और दालों के कर्तव्य चक्र को बढ़ाते हैं।
तो, इस लेख में डीसी मोटर गति नियंत्रण की विभिन्न तकनीकों का विस्तृत विवरण दिया गया है और किस प्रकार गति नियंत्रण सबसे महत्वपूर्ण है। इसके बारे में जानने की सलाह दी जाती है 12v डीसी मोटर गति नियंत्रक ।