पोस्ट एक हॉल इम्पैक्ट सेंसर नेटवर्क के माध्यम से आरपीएम फीडबैक सिग्नल लूप का उपयोग करते हुए एक इलेक्ट्रॉनिक इंजन स्पीड गवर्नर या कंट्रोलर सर्किट पर चर्चा करता है। इस विचार का अनुरोध श्री इम्सा नागा ने किया था।
सर्किट उद्देश्य और आवश्यकताएँ
- आपका समय देने के लिए आपका बहुत बहुत धन्यवाद। मेरा मानना है कि यह सर्किट एकल चरण की आपूर्ति के लिए उपयुक्त होगा। मेरा अल्टरनेटर 3 चरण 7 केवीए है और मैं इसे एक स्पीड गवर्नर के बदले में एक एक्सिलरेटर वाला डीजल वाहन इंजन के साथ जोड़ना चाहूंगा।
- मैं जो लागू करना चाहता हूं वह है - एक 'इलेक्ट्रॉनिक इंजन स्पीडेड गोवर्न', जिसमें संभवतया एक इलेक्ट्रॉनिक सर्वो नियंत्रित तंत्र होगा जैसे- ए स्पीड सेंसर सर्किट (इंजन आरपीएम सेंसर) को बनाए रखने के लिए त्वरक तंत्र को सक्रिय करने के लिए एक सर्वो मोटर चलाने के लिए अल्टरनेटर पर लागू लोड के संबंध में इंजन की एक निरंतर गति।
- यह आवृत्ति और साथ ही जनरेटर के वोल्टेज को बनाए रखने में मदद करेगा। मैं यांत्रिक पहलू का ध्यान रख पाऊंगा, यदि आप कृपया सर्वो मोटर को नियंत्रित करने के लिए एक सर्किट को इस तरह से डिजाइन करते हैं कि इसे इंजन आरपीएम में परिवर्तन के संबंध में दिशा में बदल दिया जाए। एंटीसेप्शन में बहुत बहुत धन्यवाद।
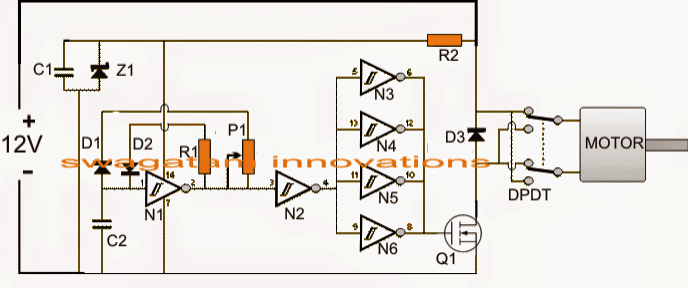
सर्किट आरेख

नोट: मोटर 12 वी स्प्रेड लोड सॉलिड के साथ रिप्लाई किया गया है
परिरूप
एक डीज़ल इंजन स्पीड गवर्नर या कंट्रोलर के सर्किट को फीडबैक RPM प्रोसेसर या a के उपयोग से उपरोक्त आकृति में देखा जा सकता है टैकोमीटर सर्किट
बाईं ओर IC1 555 चरण एक सरल टैकोमीटर सर्किट बनाता है जिसे ए के साथ कॉन्फ़िगर किया गया है हॉल प्रभाव सेंसर अपने RPM दर को सेंस करने के लिए इंजन के लोड व्हील के साथ जुड़ा हुआ है।
RPM को अनुपातिक रूप से भिन्न नाड़ी दर या आवृत्ति में परिवर्तित किया जाता है और इसे IC1 के पिन # 2 पर टॉगल करने के लिए BJT के आधार पर लगाया जाता है।
सर्किट ऑपरेशन
IC1 मूल रूप से मोनोस्टेबल मोड में धांधली है, जो इसके आउटपुट को आनुपातिक रूप से समायोजन ऑन / ऑफ स्विच करने के लिए उत्पन्न करता है, जिसकी अवधि को दिखाए गए 1M पॉट का उपयोग करके सेट किया जाता है।
IC1 से आउटपुट जो आरपीएम सामग्री को विस्तारित समयबद्ध दालों के रूप में वहन करता है, प्रतिरोधक 1K, 10K और 22uF का उपयोग करते हुए RC घटकों के एक जोड़े से मिलकर एक इंटीग्रेटर चरण द्वारा पर्याप्त रूप से चिकना किया जाता है। 2.2uF कैपेसिटर।
यह चरण एक उचित रूप से सुस्पष्ट रूप से भिन्न या घातीय भिन्न वोल्टेज में मोनोस्टेबल के किसी न किसी RPM डेटा को परिवर्तित करता है।
इस तेजी से बदलती वोल्टेज को एक देखने योग्य सर्किट के रूप में कॉन्फ़िगर किए गए अगले IC2 555 चरण के पिन # 5 के साथ जोड़ा जा सकता है।
इस अचरज का कार्य अपने सामान्य ऑपरेटिंग परिस्थितियों में इसके पिन # 3 पर एक बहुत ही कम या कम PWM आउटपुट उत्पन्न करना है।
यहां सामान्य ऑपरेटिंग स्थिति उस स्थिति को संदर्भित करती है जब होश आरपीएम निर्दिष्ट सीमा के भीतर है और आईसी 2 के पिन # 5 को एमिटर फॉलोअर से कोई वोल्टेज इनपुट नहीं मिल रहा है। यह कम PWM आउटपुट दो 100k प्रतिरोधों और IC2 पिन # 6/2 और पिन # 7 के साथ जुड़े 1uF संधारित्र को उपयुक्त रूप से समायोजित करके लागू किया जा सकता है।
IC2 के पिन # 3 से यह कम PWM पर्याप्त रूप से TIP122 को स्विच करने में असमर्थ है और इसलिए संकेतित मोटर व्हील असेंबली आवश्यक गति प्राप्त करने में असमर्थ है और इसलिए निष्क्रिय रहता है।
हालाँकि, RPM के बढ़ने के बाद टैकोमीटर तेजी से उच्च वोल्टेज का उत्पादन करना शुरू कर देता है, जिसके कारण IC2 के पिन # 5 पर आनुपातिक रूप से बढ़ते वोल्टेज का कारण बनता है।
यह बाद में TIP122 को कठिन संचालन करने के लिए, और जुड़ा हुआ मोटर को पर्याप्त टोक़ प्राप्त करने की अनुमति देता है, जिससे यह संलग्न त्वरक पेडल को डीक्लरेटिंग मोड की ओर दबाने लगता है।
यह प्रक्रिया डीजल इंजन को अपनी गति को कम करने के लिए मजबूर करती है, जिसके कारण टैकोमीटर और पीडब्लूएम चरणों को उनकी मूल स्थितियों को बहाल करने और डीजल मोटर के लिए आवश्यक नियंत्रित गति को लागू करने का कारण बनता है।
दिखाया त्वरक मोटर व्यवस्था के बजाय, TIP122 के कलेक्टर को वैकल्पिक रूप से वायर्ड किया जा सकता है सीडीआई इकाई एक समान गति में कमी के लिए डीजल इंजन, एक ठोस राज्य और चर्चा इलेक्ट्रॉनिक इंजन स्पीड कंट्रोल या इलेक्ट्रॉनिक इंजन स्पीड गवर्नर सर्किट के अधिक विश्वसनीय कार्यान्वयन के लिए।
स्थापित कैसे करें
प्रारंभ में IC1, IC2 चरणों को IC2 के पिन # 5 के साथ एमिटर अनुयायी लिंक को हटाकर डिस्कनेक्ट रखें।
अगला सुनिश्चित करें कि दो 100k प्रतिरोधों को उचित रूप से बदला और समायोजित किया गया है ताकि IC2 का पिन # 3 सबसे कम संभव PWM (@ लगभग 5% समय दर पर) उत्पन्न करता है।
इसके बाद, का उपयोग करके ए 0 से 12 वी समायोज्य बिजली की आपूर्ति IC2 के पिन # 5 पर एक अलग वोल्टेज लागू करें और पिन # 3 पर एक आनुपातिक रूप से बढ़ते PWM की पुष्टि करें।
एक बार जब देखने योग्य अनुभाग का परीक्षण किया जाता है, तो इसके टैकोमीटर को वांछित ओवर-लिमिट आरपीएम के अनुरूप ज्ञात आरपीएम दालों को लागू करके जांचना चाहिए। एमिटर के अनुयायी BJT बेस एडजस्ट को समायोजित करने के दौरान, इसका एमिटर कम से कम 10V उत्पन्न करने में सक्षम होता है या आईसी 2 पीडब्लूएम से जुड़ा पैडल कंट्रोल मोटर पर आवश्यक टॉर्क उत्पन्न करने के लिए पर्याप्त स्तर का उत्पादन करता है।
कुछ और ट्विकिंग और प्रयोग के बाद आप इंजन और इसके साथ जुड़े लोड के लिए आवश्यक स्वचालित गति नियंत्रण हासिल करने की उम्मीद कर सकते हैं।
अपडेट करें
यदि मोटर को स्प्रिंग लोडेड सोलनॉइड के साथ बदल दिया जाता है, तो नीचे दिए गए अनुसार उपरोक्त डिज़ाइन को बहुत सरल बनाया जा सकता है:

सोलेनोइड शाफ्ट को इच्छित स्वचालित इंजन गति विनियमन को पूरा करने के लिए त्वरक पेडल के साथ जोड़ा जा सकता है।
वोल्टेज कनवर्टर की आवृत्ति के बारे में अधिक विकल्पों के लिए, आप इसका उल्लेख कर सकते हैं यह लेख ।
की एक जोड़ी: टाइमर फिटनेस जिम अनुप्रयोग सर्किट नियंत्रित अगला: पीजो मैट सर्किट के साथ बैटरी चार्ज करना