सर्वो मोटर्स स्व-निहित यांत्रिक उपकरण हैं जिनका उपयोग मशीनों को बड़ी सटीकता के साथ नियंत्रित करने के लिए किया जाता है। ये खिलौने से लेकर औद्योगिक स्वचालन तक कई अनुप्रयोगों में पाए जाते हैं। विभिन्न प्रकार की मोटर है, लेकिन सर्वो मोटर्स को विशेष रूप से मशीनों को नियंत्रित करने के लिए विशिष्ट कोणीय स्थिति के लिए डिज़ाइन किया गया है। आमतौर पर सर्वो मोटर का उपयोग 0 ° से 180 ° और 0 ° से 90 ° के बीच कोणीय गति को नियंत्रित करने के लिए किया जाता है। सर्वो मोटर काम सिद्धांत PWM के आधार पर ( पल्स चौड़ाई मॉडुलन ) दालें।

सर्वो मोटर
8051 माइक्रोकंट्रोलर के साथ सर्वो मोटर इंटरफेसिंग
एक सर्वो मोटर सटीक कोणीय आंदोलन के लिए सबसे अधिक इस्तेमाल की जाने वाली मोटर में से एक है। सर्वो मोटर का उपयोग करने का लाभ यह है कि मोटर की कोणीय स्थिति को बिना किसी प्रतिक्रिया तंत्र के नियंत्रित किया जा सकता है। आमतौर पर सर्वो मोटर्स का उपयोग किया जाता है वाणिज्यिक और औद्योगिक अनुप्रयोग । इन्हें व्यापक रूप से ड्राइव सिस्टम जैसे रोबोट, हवाई जहाज आदि के रूप में भी उपयोग किया जाता है।

8051 माइक्रोकंट्रोलर के साथ इंटरफोर्स सर्वो मोटर
हॉबी सर्वो मोटर काम करने का सिद्धांत और संचालन बहुत सरल है, इसमें तीन तार शामिल थे जहां उनमें से दो (काले और लाल) शक्ति प्रदान करने के लिए और तीसरे तार का उपयोग नियंत्रण संकेत प्रदान करने के लिए किया जाता है। पल्स चौड़ाई संशोधित (PWM) तरंगों का उपयोग नियंत्रण संकेतों के रूप में किया जाता है और नियंत्रण इनपुट पर नाड़ी की चौड़ाई से कोणीय स्थिति निश्चित है। इस लेख में, हम 0-180 ° से रोटेशन के कोण वाले सर्वो मोटर का उपयोग कर रहे हैं और कोणीय स्थिति 1ms से 2ms के बीच कर्तव्य चक्रों को अलग करके नियंत्रित किया जा सकता है।
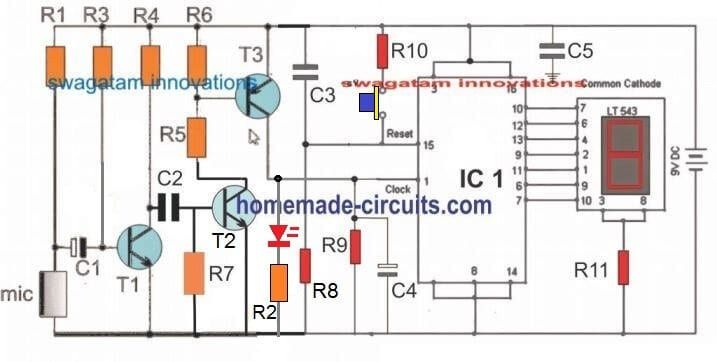
यहाँ सर्वो मोटर के साथ इंटरफेस है 8051 माइक्रोकंट्रोलर ग्राउंड पिन और मोटर से जुड़े काले तार को लाल तार से बिजली मिलती है। 8051 माइक्रोकंट्रोलर के सर्वो मोटर कनेक्टेड पोर्ट0 का नियंत्रण। 11.0592MHz क्रिस्टल थरथरानवाला का उपयोग माइक्रोकंट्रोलर को स्पंदित घड़ी प्रदान करने के लिए किया जाता है और क्रिस्टल के संचालन को स्थिर करने के लिए 22pf सिरेमिक कैपेसिटर का उपयोग किया जाता है। माइक्रोकंट्रोलर को रीसेट पर पावर प्रदान करने के लिए 10K 10 और 10uf संधारित्र का उपयोग किया जाता है।
कोण घुमाव के साथ एक सर्वो मोटर को नियंत्रित करना
सर्वो मोटर काम सिद्धांत मुख्य रूप से कर्तव्य चक्र पर निर्भर करता है। यह पल्स चौड़ाई संशोधित (PWM) तरंगों का उपयोग नियंत्रण संकेतों के रूप में करता है। नियंत्रण पिन की पल्स चौड़ाई द्वारा रोटेशन का कोण दृढ़ है। यहां सर्वो मोटर का उपयोग 0 से 180 डिग्री के रोटेशन के कोण के लिए किया जाता है। हम नाड़ी को 1ms से 2ms के बीच अलग करके सटीक कोणीय स्थिति को नियंत्रित कर सकते हैं।

कोण घुमाव के साथ एक सर्वो मोटर को नियंत्रित करना
सर्वो मोटर प्रोग्रामिंग कोणीय घुमाव के साथ
#शामिल
Sbit servomotor_pin = P0 ^ 5
शून्य विलंब (अहस्ताक्षरित int)
शून्य सर्व_देल (अहस्ताक्षरित int)
शून्य मुख्य ()
{{
सर्वोमोटर_पिन = 0x00
करना
{{
// 0 ° बारी
सर्वोमोटर_पिन = 0x01
Sevo_delay (50)
सर्वोमोटर_पिन = 0x00
देरी (1000)
// 90 डिग्री पर मुड़ें
सर्वोमोटर_पिन = 0x01
सेवो_दले (82)
सर्वोमोटर_पिन = 0x00
देरी (1000)
// 180 डिग्री पर मुड़ें
सर्वोमोटर_पिन = 0x01
Sevo_delay (110)
सर्वोमोटर_पिन = 0x00
देरी (1000)
जबकि (1)
}
}
शून्य देरी (अहस्ताक्षरित int a)
{{
अनसाइंटेड इंट पी
के लिए (पी = 0 पी
}
शून्य सर्व_देल (अहस्ताक्षरित int a)
{{
अनसाइंटेड इंट पी
के लिए (पी = 0 पी
}
सर्वो मोटर कार्य सिद्धांत
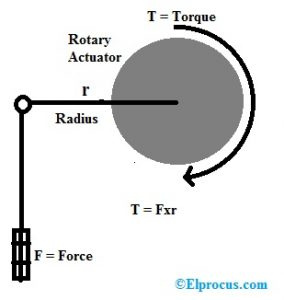
सर्वो मोटर कार्य सिद्धांत मुख्य रूप से principle फ्लेमिंग बाएं हाथ नियम ’पर निर्भर करता है। मूल रूप से सर्वो मोटर्स के साथ अनुकूलित किया जाता है डीसी मोटर्स , एक स्थिति सेंसर, एक गियर में कमी, और एक इलेक्ट्रॉनिक सर्किट। डीसी मोटर्स एक बैटरी से संचालित होती है और उच्च गति और कम टॉर्क पर चलती है। हमने डीसी मोटर्स से जुड़े शाफ्ट और गियर को इकट्ठा किया फिर हम धीरे-धीरे मोटर की गति को बढ़ा और घटा सकते हैं।
स्थिति संवेदक अपनी निश्चित स्थिति से शाफ्ट के स्थान को समझ लेता है और नियंत्रण सर्किट को सूचना भेजता है। नियंत्रण सर्किट स्थिति संवेदक के अनुसार संकेतों को डिकोड करता है और पसंदीदा स्थिति के साथ मोटर्स के वास्तविक स्थान की तुलना करता है और तदनुसार आवश्यक स्थिति प्राप्त करने के लिए डीसी मोटर के रोटेशन की दिशा को नियंत्रित करता है। आम तौर पर सर्वो मोटर को 4.8 वी से 6 वी डीसी आपूर्ति की आवश्यकता होती है।
एक सीरियल पोर्ट कमांड द्वारा सर्वो मोटर नियंत्रण
इस परियोजना का मुख्य उद्देश्य एक व्यक्तिगत कंप्यूटर का उपयोग करके सर्वो मोटर को नियंत्रित करना है। इसे सर्किट को कमांड भेजने के लिए पर्सनल कंप्यूटर सीरियल पोर्ट से माइक्रोकंट्रोलर और सीरियल इनपुट लाइन से सिंगल कंट्रोल लाइन की जरूरत होती है। समय स्रोत क्रिस्टल थरथरानवाला द्वारा प्रदान किया जाता है। डिज़ाइन किए गए सर्वो मोटर सर्किट को कंप्यूटर में सीरियल केबल और लेवल शिफ्टर की मदद से इंटरफेयर किया जाता है, फिर पीसी में Terminal हाइपर टर्मिनल ’सॉफ़्टवेयर खोलें, जैसा कि कंप्यूटर के कंपार्टमेंट का चयन करें।

एक सीरियल पोर्ट कमांड द्वारा सर्वो मोटर नियंत्रण
एक बार जब हाइपर टर्मिनल के माध्यम से पर्सनल कंप्यूटर (पीसी) से हाइपर टर्मिनल के माध्यम से कमांड भेजे जाते हैं, तो माइक्रोकंट्रोलर इस डेटा को प्राप्त करता है और पूर्वनिर्धारित डेटा के साथ उनकी तुलना करता है और मोटर चालक को ड्राइव करने के लिए सक्रिय करने के लिए संबंधित सिग्नल उत्पन्न करता है। वांछित गति। अनेक माइक्रोकंट्रोलर प्रोजेक्ट्स रोबोट, रनवे हेलीकॉप्टर और इतने पर जैसे इमदादी मोटर के आधार पर विकसित किया गया है। हम वायरलेस कैमरा के साथ इंटरफेस करके सुरक्षा उद्देश्य के लिए सर्वो मोटर का उपयोग कर सकते हैं क्योंकि हम कैमरा 360 डिग्रेस को नियंत्रित करना संभव कर सकते हैं।
सेल्फ बैलेंसिंग रोबोट
सेल्फ मोटर्स की मदद से सेल्फ बैलेंसिंग रोबोट खुद को संतुलित करने में सक्षम है। इस रोबोट ने संरचनात्मक, यांत्रिक और इलेक्ट्रॉनिक घटकों का उपयोग करके इकट्ठा किया है जो नेत्रहीन असंतुलित मंच का उत्पादन करता है जो एक संरेखण में टिपिंग के लिए अत्यधिक निपटाया जाता है। रोबोट के पहिए दो तरह से स्वतंत्र रोटेशन करने में सक्षम हैं, जो एक सर्वो मोटर द्वारा संचालित होता है। जमीन के सापेक्ष उपकरण के कोण के बारे में जानकारी प्राप्त की जाएगी झुकाव सेंसर उपकरण पर।

सेल्फ बैलेंसिंग रोबोट
टिल्ट सेंसर एक एक्सेलेरोमीटर, जायरोस्कोपिक सेंसर, या हो सकता है आईआर सेंसर (जमीन को मापने के लिए दूरी)। सेंसर नियंत्रण इकाई को सूचना भेजता है, जो डिवाइस को संतुलित करने के लिए इमदादी मोटर्स को स्थिति नियंत्रण संकेतों की भरपाई करने के लिए एक मूल आनुपातिक, अभिन्न, व्युत्पन्न (पीआईडी) एल्गोरिदम का उपयोग करके प्रतिक्रिया की प्रक्रिया करेगा।
सर्वो मोटर अनुप्रयोगों
- टुकड़ों को काटने के लिए प्रेस मशीनों में इसका उपयोग किया जाता है
- इसका उपयोग सुगर फिलिंग स्टेशन में किया जाता है
- इसका उपयोग लेबलिंग अनुप्रयोगों में किया जाता है
- यह यादृच्छिक समय समारोह के साथ पैकिंग सिस्टम का उपयोग किया जाता है
- इसका इस्तेमाल हवाई जहाज में किया जाता है
सर्वो मोटर के लाभ
- यदि एक मोटर को भारी भार मिलता है, तो चालक मोटर को घुमाने के प्रयासों के रूप में मोटर के तार में करंट बढ़ा देगा। मुख्य रूप से, कोई आउट-ऑफ-स्टेप स्थिति नहीं है।
- सर्वो मोटर्स द्वारा उच्च गति का संचालन संभव है।
यह सब सर्वो मोटर कार्य सिद्धांत के बारे में है और 8051 माइक्रोकंट्रोलर के साथ इंटरफेस इस लेख के संबंध में किसी भी तकनीकी सहायता के लिए इलेक्ट्रॉनिक्स प्रोजेक्ट जिसे आरटीसी, ओएलईडी, फ्लैश मेमोरी, कस्टमाइज्ड एलसीडी, टच स्क्रीन डिस्प्ले और आदि जैसे इंटरफेसिंग उपकरणों का उपयोग करके तैयार किया गया है। आप नीचे कमेंट सेक्शन में अपनी टिप्पणी देकर हमसे संपर्क कर सकते हैं।