पोस्ट किसी भी माइक्रोकंट्रोलर या जटिल जॉयस्टिक कार्यान्वयन के बिना 433kHz आरएफ मॉड्यूल का उपयोग करते हुए एक सरल आरसी हेलीकाप्टर रिमोट कंट्रोल सर्किट पर चर्चा करता है।
श्री जितेंद्र द्वारा विचार का अनुरोध किया गया था।
सर्किट उद्देश्य और आवश्यकताएँ
- मैं बड़े पैमाने पर आरसी हेलीकाप्टर बना रहा हूं। जिसमें मैं 4 मोटर्स का उपयोग कर रहा हूं। 1 मुख्य 12 वी मोटर के लिए: तंत्र यह है कि मैं चाहता हूं कि इसकी गति रिमोट पर नियंत्रक कुंजी द्वारा नियंत्रित हो, 0 से पूर्ण गति तक।
- 2 3 वी मोटर्स के लिए: इसका तंत्र केवल प्रत्येक मोटर के लिए रिमोट पर व्यक्तिगत कुंजी के साथ आगे और रिवर्स रोटेशन के लिए है क्योंकि यह रोटार की स्वैप प्लेटों को संचालित करेगा।
- 3rd 9v टेल मोटर के लिए: इसे हेलिकॉप्टर के रिसीवर बोर्ड पर एक नियामक का उपयोग करके एक संतुलन गति के लिए सेट किया जाना चाहिए ताकि मैं हेलिकॉप्टर को रोकने के लिए मैन्युअल रूप से गति को समायोजित कर सकूं .. रोटार के साथ घूमने से, और वहाँ पर एक कुंजी है रिमोट को धीमा करना होगा और इसके संतुलन से मोटर को गति देगा।
- रिसीवर बोर्ड में इनपुट शक्ति 12v और वर्तमान 8-10 एम्पीयर होगी। इसकी सीमा 500-800 मीटर तक होनी चाहिए। महोदय, आप ऐसे आरसी सर्किट बोर्ड को रिमोट के साथ डिजाइन कर सकते हैं।
- मैं पिछले दो सालों से ऐसे सर्किट बोर्ड की तलाश में हूं।
- मेरी अनुपस्थिति के कारण मेरा प्रोजेक्ट रोक दिया गया था। सर कृपया मेरी मदद करें। अपनी सुविधा के लिए आप दो अलग-अलग आरसी सर्किट बोर्ड को डिजाइन कर सकते हैं एक मुख्य मोटर और टेल मोटर के लिए और दूसरा दो फॉरवर्ड और रिवर्स रोटेटिंग मोटर्स के लिए।
- लेकिन दोनों सर्किट में इनपुट करंट और संभावित अंतर समान होना चाहिए, एक ही रेंज के साथ जो कि 500-800 मीटर की दूरी पर है। कृपया नंबरिंग के साथ आवश्यक घटकों के नाम का भी उल्लेख करें।
परिरूप
अनुरोधित सर्किट मॉड्यूल जो प्रस्तावित आरसी हेलीकाप्टर के निर्माण के लिए आवश्यक हैं:
1) एक 12V पीडब्लूएम चर गति नियंत्रक
2) एक 3 वी मोटर रिवर्स कंट्रोलर सर्किट।
3) एक चर गति नियंत्रक सर्किट के साथ एक 9V मोटर नियामक।
उपरोक्त सभी विशिष्टताओं को एक लंबी श्रेणी 433 मेगाहर्ट्ज के माध्यम से नियंत्रित करने की आवश्यकता है आरएफ रिमोट कंट्रोल मॉड्यूल ।
वांछित 433 मेगाहर्ट्ज आरएफ रिमोट मॉड्यूल किसी भी ऑनलाइन स्टोर से या आपके निकटतम इलेक्ट्रॉनिक डीलर से खरीदा जा सकता है। रिमोट कंट्रोल की सीमा आरसी हेलीकॉप्टर रेंज के आवश्यक विनिर्देशों के अनुसार होनी चाहिए, यहां यह 1 किमी के भीतर होना चाहिए।
आरसी हेलीकाप्टर रिमोट कंट्रोल सर्किट पर चर्चा के लिए, एक 6 चैनल आरएफ रिमोट मॉड्यूल की आवश्यकता होगी, ठीक उसी के समान जो हमारे पहले के लिए इस्तेमाल किया गया था सबसे सरल ड्रोन रिमोट कंट्रोल सर्किट ।
उसी की छवि को नीचे देखा जा सकता है:

लेफ्ट साइड ग्रीन बोर्ड रिमोट रिसीवर मॉड्यूल है जिसमें छह नियंत्रण रिले हैं और आवश्यक नियंत्रण कार्यों के लिए इस इकाइयों को आरसी हेलीकॉप्टर के अंदर स्थापित करने की आवश्यकता है।
दाईं ओर की इकाई ट्रांसमीटर हैंडसेट है जिसे उपयोगकर्ता द्वारा धारण किया जाना चाहिए और संबंधित बटन को संबंधित गति नियंत्रण जानकारी के साथ रिले बोर्ड को कमांड करने के लिए दबाया जाता है।
अब देखते हैं कि कैसे छह रिले को विभिन्न पीडब्लूएम सर्किट के साथ कॉन्फ़िगर करने और आरसी हेलिकॉप्टर के अंदर स्थापित करने की आवश्यकता है, निम्नलिखित जानकारी से:
याद रखें कि रिसीवर बोर्ड में दिखाए गए रिले संपर्क डिफ़ॉल्ट रूप से सभी रिक्त होते हैं, जिसका अर्थ है कि उनके एन / सी और एन / ओ संपर्क वायर्ड नहीं हैं और उन्हें निम्नलिखित आरेखों में चित्रित किया जाना चाहिए।
अनुरोध के अनुसार, 9 वी मोटर और 12 वी मोटर गति को रिमोट हैंडसेट के बाद के दबाव के माध्यम से नियंत्रित करने की आवश्यकता है। इस फ़ंक्शन को लागू करने के लिए सर्किट नीचे दिखाए गए हैं:
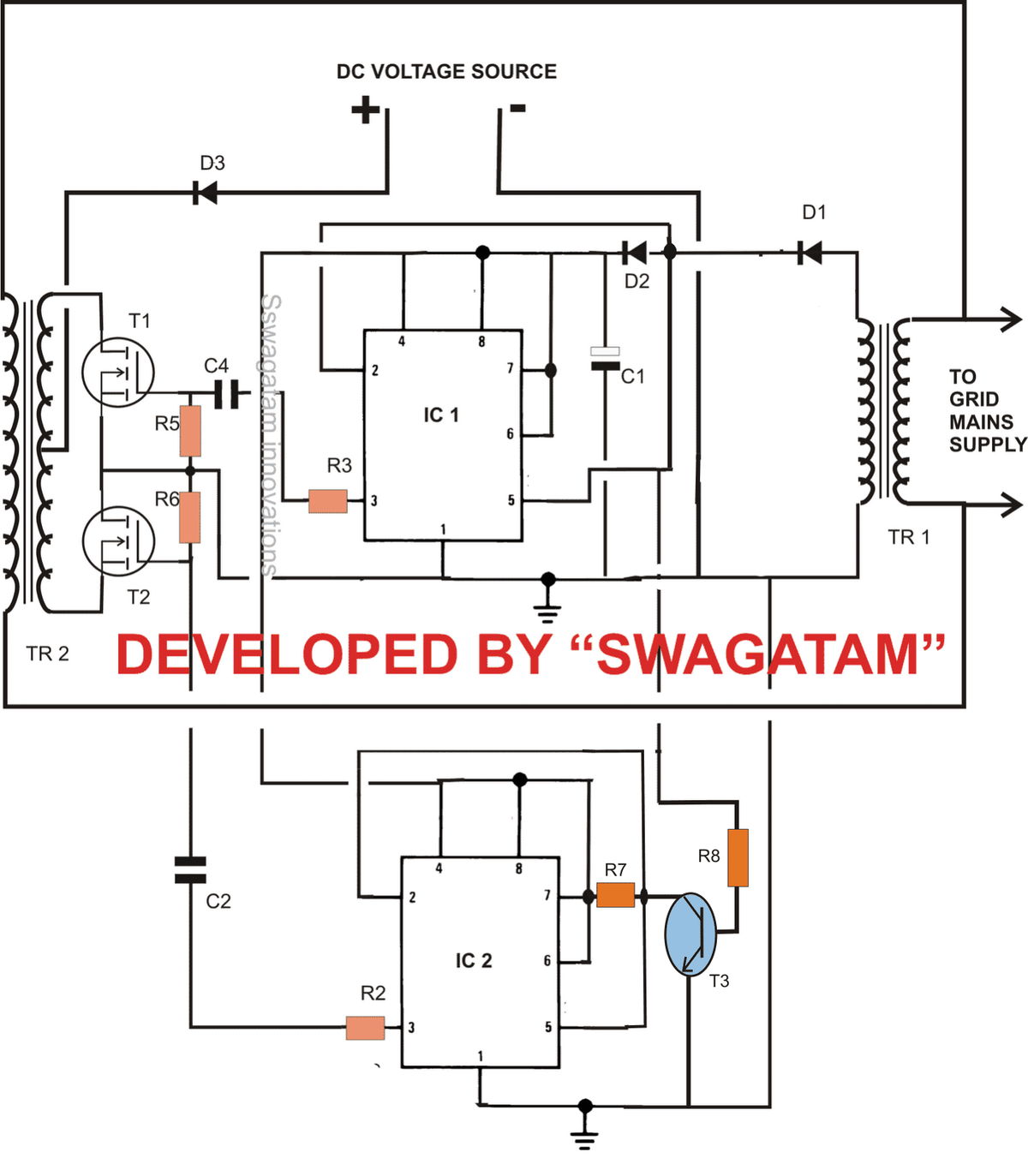
मोटर चालक योजनाबद्ध


सर्किट ऑपरेशन
जैसा कि स्कीमैटिक्स में देखा जा सकता है, एक समान IC 555 PWM सर्किट उद्देश्य के लिए कार्यरत हैं। छः रिले में से चार यहां दिखाए गए कनेक्शनों में अपने संबंधित संपर्कों के साथ लगे हुए हैं।
डिजाइन में आईसी 555 को एक बुनियादी अचूक सर्किट के रूप में धांधली माना जाता है, कुछ निर्दिष्ट आवृत्ति के साथ दोलन करने के लिए सौंपा गया है इसके आर 1, आर 2, और सी घटक मूल्यों पर निर्भर करता है ।
संकेत दिए गए रिले ऑपरेशन के अनुसार IC 555 के PWM कंटेंट को अलग करने के लिए IC 741 के रूप में वोल्टेज फॉलोअर को IC 555 के कंट्रोल पिन # 5 से कॉन्फ़िगर किया गया है।
IC 741 के पिन # 3 पर वोल्टेज का अनुसरण किया जाता है या पिन # 6 पर स्थानांतरित किया जाता है और बाद में IC 555 के # 5 को पिन किया जाता है। पिन # 3 कैपेसिटर चार्ज स्तर के आधार पर यह अलग वोल्टेज आपूर्ति वोल्टेज की सीमा के बीच कहीं भी हो सकता है शून्य।
संधारित्र पर चार्ज स्तर विविध है या बस इसे चार्ज करने या संबंधित रिले संपर्क सक्रियण के माध्यम से निर्वहन द्वारा बदल दिया गया है। चार्ज करने के लिए ऊपरी रिले कॉन्टैक्ट को IC 555 के पिन # 5 पर एक बढ़ते वोल्टेज को सक्रिय करने के लिए बंद या सक्रिय किया जाता है, जबकि कम रिले संपर्कों को सक्रिय करने से कैपेसिटर को आईसी 555 के पिन # 5 पर एक आनुपातिक रूप से कम वोल्टेज का कारण बनता है।
उपरोक्त क्रियाएँ पिन # 3 परिणामों को एक अलग बदलती PWM में बदल देती हैं, जिसके कारण मोटर या तो तेज़ गति से चलती है या धीमी हो जाती है।
फ्रो 9V मोटर डायोड की एक श्रृंखला को चालक ट्रांजिस्टर के उत्सर्जक पर संलग्न देखा जा सकता है, इससे वोल्टेज में आवश्यक गिरावट सुनिश्चित होती है और मोटर के विनिर्देशों के अनुसार 12V को अनुमानित 10V विनियमित आपूर्ति में बदलने में मदद मिलती है।
3V मोटर रिवर्स फॉरवर्ड ऑपरेशन
अनुरोध में तीसरी और अंतिम मांग है रिवर्स / आगे नियंत्रण आरएफ ट्रांसमीटर हैंडसेट बटन प्रेस का उपयोग कर 3V मोटर का।
शेष दो रिले अब इस विशेष निष्पादन के लिए उपयोग किए जा सकते हैं, और निम्न चित्र में दिखाए अनुसार किया जाता है:

यहाँ हम एक सटीक PWM जनरेटर सर्किट के रूप में वायर्ड IC 555 को नियोजित करते हैं। PWM को प्रतिष्ठानों को अंतिम रूप देने से पहले 5K पूर्व निर्धारित के माध्यम से उचित रूप से सेट किया जाता है, ताकि मोटर की गति हेलीकॉप्टर के आवश्यक संतुलन के लिए पूरी तरह से समायोजित हो।
रिले को केवल आवश्यक रिवर्स लागू करने के लिए वायर्ड देखा जा सकता है, और युग्मित रिले संपर्क के टॉगल करने के जवाब में मोटर के लिए एक दक्षिणावर्त या एंटिक्लॉकवाइज मोशन जो आगे एक डीपीडीटी रिले बनाते हैं।
शॉर्ट सर्किट को रोकने के लिए, अधिमानतः रिसीवर मॉड्यूल को इन दो रिले के लिए संशोधित किया जाना चाहिए, जैसे कि दोनों में से किसी भी बटन को दबाने से दोनों रिले एक साथ सक्रिय होने का कारण बनते हैं, सक्रियण के लिए सिंक में दबाए जाने वाले दो स्विच के आधार पर।
इस टॉगलिंग से विपरीत दिशा में मोटर घुमाव को तुरंत फ्लिप करने की उम्मीद की जा सकती है, जिससे उपयोगकर्ता आरसी हेलिकॉप्टर मशीन में आवश्यक दिशात्मक परिवर्तनों को निष्पादित कर सकता है।
यह सर्किट और रिले आरसी हेलीकाप्टर रिमोट कंट्रोल सर्किट के लिए वायरिंग निर्देशों को समाप्त करता है, आगे के संदेह के लिए कृपया उन्हें अपनी टिप्पणियों के माध्यम से व्यक्त करने में संकोच न करें।
की एक जोड़ी: अल्ट्रासोनिक स्मार्ट स्वचालित / बंद स्विच सर्किट अगला: एकल MOSFET क्लास एक पावर एम्पलीफायर सर्किट








![टीवी रिमोट [फुल सर्किट डायग्राम] का उपयोग करके लाइट्स, पंखे को नियंत्रित करें](https://electronics.jf-parede.pt/img/3-phase-power/43/control-lights-fan-using-tv-remote-full-circuit-diagram-1.jpg)