ए सर्वो मोटर या सर्वो एक प्रकार की विद्युत मोटर है जिसका उपयोग मशीन के पुर्जों को उच्च परिशुद्धता के साथ घुमाने के लिए किया जाता है। इस मोटर में एक नियंत्रण सर्किट शामिल है जो मोटर के शाफ्ट के वर्तमान स्थान पर फीडबैक प्रदान करता है, इसलिए यह फीडबैक इन मोटरों को उच्च परिशुद्धता के साथ घूमने की अनुमति देता है। किसी वस्तु को कुछ दूरी या कोण पर घुमाने में सर्वो मोटर लाभदायक होती है। इस मोटर को दो प्रकार के एसी सर्वो मोटर और डीसी सर्वो मोटर में वर्गीकृत किया गया है। यदि एक सर्वो मोटर काम करने के लिए डीसी पावर का उपयोग करती है तो मोटर को डीसी सर्वो मोटर कहा जाता है जबकि अगर यह एसी पावर के साथ काम करती है तो इसे एसी सर्वो मोटर के रूप में जाना जाता है। यह ट्यूटोरियल संक्षिप्त जानकारी प्रदान करता है डीसी सर्वो मोटर - अनुप्रयोगों के साथ काम करना।
डीसी सर्वो मोटर क्या है?
एक सर्वोमोटर जो स्थिति, वेग, या त्वरण जैसे यांत्रिक आउटपुट का उत्पादन करने के लिए डीसी विद्युत इनपुट का उपयोग करता है, उसे डीसी सर्वोमोटर कहा जाता है। ठीक और बहुत जल्दी।

डीसी सर्वो मोटर निर्माण और कार्य
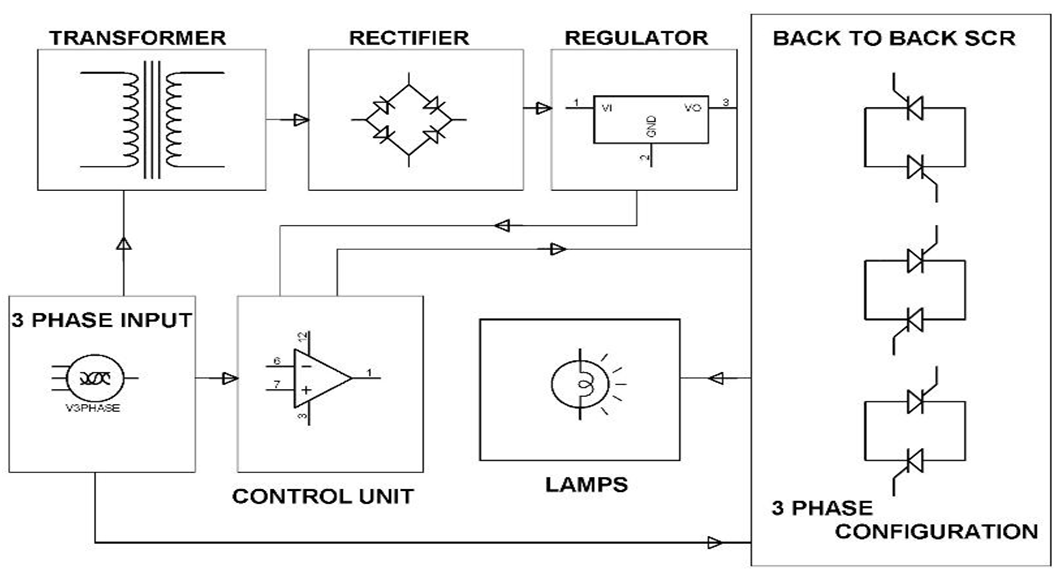
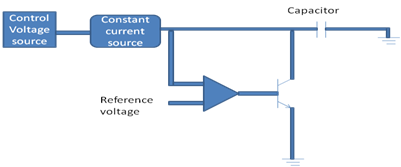
डीसी सर्वो मोटर का निर्माण विभिन्न घटकों के साथ किया जाता है जो निम्नलिखित ब्लॉक आरेख में दिए गए हैं। इस आरेख में, प्रत्येक घटक और उसके कार्य के बारे में नीचे चर्चा की गई है।

इसमें उपयोग की जाने वाली मोटर एक विशिष्ट डीसी मोटर है जिसमें इसकी फील्ड वाइंडिंग भी शामिल है जो अलग से उत्तेजित होती है। तो उत्तेजना प्रकृति के आधार पर, आगे आर्मेचर-नियंत्रित और फील्ड-नियंत्रित सर्वो मोटर्स के रूप में वर्गीकृत किया जा सकता है।
इसमें उपयोग किया जाने वाला भार एक साधारण पंखा या औद्योगिक भार है जो केवल मोटर के यांत्रिक शाफ्ट से जुड़ा होता है।
इस निर्माण में गियरबॉक्स आवेदन के आधार पर मोटर के आउटपुट जैसे त्वरण, स्थिति या वेग को बदलने के लिए एक यांत्रिक ट्रांसड्यूसर की तरह काम करता है।

पोजीशन सेंसर का मुख्य कार्य लोड की वर्तमान स्थिति के बराबर फीडबैक सिग्नल प्राप्त करना है। आम तौर पर, यह एक पोटेंशियोमीटर होता है जिसका उपयोग वोल्टेज प्रदान करने के लिए किया जाता है जो गियर तंत्र के माध्यम से मोटर शाफ्ट के निरपेक्ष कोण के समानुपाती होता है।
तुलनित्र कार्य एक स्थिति संवेदक के ओ / पी की तुलना करना है और त्रुटि संकेत उत्पन्न करने के लिए एक संदर्भ बिंदु है और इसे एम्पलीफायर को देता है। यदि डीसी मोटर सटीक नियंत्रण के साथ काम करती है, तो कोई त्रुटि नहीं होती है। स्थिति संवेदक, गियरबॉक्स और तुलनित्र सिस्टम को एक बंद लूप बना देगा।
एम्पलीफायर फ़ंक्शन तुलनित्र से त्रुटि को बढ़ाना और डीसी मोटर को फीड करना है। इसलिए, शून्य स्थिर-अवस्था त्रुटि के लिए जहां भी लाभ को मजबूत किया जाता है, यह एक आनुपातिक नियंत्रक की तरह कार्य करता है।
नियंत्रित सिग्नल फीडबैक सिग्नल के आधार पर PWM (पल्स विड्थ मॉड्युलेटर) को इनपुट देता है ताकि यह सटीक नियंत्रण के लिए मोटर के इनपुट को मॉड्युलेट करे अन्यथा शून्य स्थिर-स्थिति त्रुटि। इसके अलावा, यह पल्स चौड़ाई न्यूनाधिक दालों का उत्पादन करने के लिए एक संदर्भ तरंग और तुलनित्र का उपयोग करता है।
बंद-पाश प्रणाली बनाकर, त्वरण, वेग या सटीक स्थिति प्राप्त की जाती है। जैसा कि नाम से पता चलता है, सर्वो मोटर एक नियंत्रित मोटर है जो फीडबैक और नियंत्रक प्रभाव के कारण पसंदीदा आउटपुट प्रदान करती है। त्रुटि संकेत को बस प्रवर्धित किया जाता है और सर्वो मोटर को चलाने के लिए उपयोग किया जाता है। नियंत्रण सिग्नल और पल्स चौड़ाई मॉड्यूलेटर-उत्पादक प्रकृति के आधार पर, इन मोटरों में एफपीजीए चिप्स या डिजिटल सिग्नल प्रोसेसर के साथ बेहतर नियंत्रित तरीके होते हैं।
डीसी सर्वो मोटर का कार्य है; जब भी डीसी मोटर पर इनपुट सिग्नल लगाया जाता है तो यह शाफ्ट और गियर को घुमाता है। तो मूल रूप से, गियर आउटपुट के रोटेशन को पोजीशन सेंसर (पोटेंशियोमीटर) में वापस फीड किया जाता है, जिसके नॉब्स अपने प्रतिरोध को बदलते हैं और बदलते हैं। जब भी प्रतिरोध को बदला जाता है तो एक वोल्टेज को बदल दिया जाता है जो एक त्रुटि संकेत है जिसे नियंत्रक में फीड किया जाता है और इसके परिणामस्वरूप PWM उत्पन्न होता है।
डीसी सर्वो मोटर्स के प्रकारों के बारे में अधिक जानने के लिए, कृपया इस लिंक को देखें: सर्वो मोटर्स के विभिन्न प्रकार .
डीसी सर्वो मोटर का ट्रांसफर फंक्शन
ट्रांसफर फ़ंक्शन को ओ/पी चर के लाप्लास ट्रांसफॉर्म (एलटी) के अनुपात के रूप में परिभाषित किया जा सकता है एलटी ( लाप्लास रूपांतरण ) i/p चर का। आम तौर पर, डीसी मोटर ऊर्जा को विद्युत से यांत्रिक में बदलती है। आर्मेचर टर्मिनलों पर आपूर्ति की गई विद्युत ऊर्जा को नियंत्रित यांत्रिक ऊर्जा में परिवर्तित किया जाता है।
आर्मेचर-नियंत्रित डीसी सर्वो मोटर ट्रांसफर फ़ंक्शन नीचे दिखाया गया है।

θ(s)/Va(s) = (K1/(Js2 + Bs)*(Las + Ra)) /1 + (K1KbKs)/(Js2 + Bs)*(Las+Ra)
फील्ड-नियंत्रित डीसी सर्वोमोटर ट्रांसफर फ़ंक्शन नीचे दिखाया गया है।

θ(s)/Vf (s) = Kf / (sLf + Rf) * (s2J + Bs)
आर्मेचर-नियंत्रित डीसी सर्वो मोटर क्लोज-लूप सिस्टम की वजह से बेहतर प्रदर्शन प्रदान करती है, जब इसकी तुलना फील्ड नियंत्रित डीसी सर्वो मोटर से की जाती है, जो ओपन-लूप सिस्टम है। इसके अलावा, क्षेत्र नियंत्रण प्रणाली के भीतर प्रतिक्रिया की गति धीमी है। आर्मेचर नियंत्रित केस में, आर्मेचर का इंडक्शन नगण्य होता है, जबकि फील्ड कंट्रोल केस में यह समान नहीं होता है। लेकिन, इनफील्ड नियंत्रण में, बेहतर भिगोना प्राप्त करने योग्य नहीं है, जबकि आर्मेचर नियंत्रण में इसे प्राप्त किया जा सकता है।
विशेष विवरण
डीसी सर्वो मोटर प्रदर्शन विनिर्देश प्रदान करती है जिसमें निम्नलिखित शामिल हैं। मोटर को सही आकार देने के लिए इन विनिर्देशों को एप्लिकेशन की लोड आवश्यकताओं के आधार पर मिलान किया जाना चाहिए।
- शाफ़्ट गति केवल उस गति को परिभाषित करती है जिस पर शाफ्ट मुड़ता है, RPM (रोटेशन प्रति मिनट) के भीतर व्यक्त किया जाता है।
- आम तौर पर, निर्माता द्वारा पेश की जाने वाली गति ओ/पी शाफ्ट की नो-लोड गति होती है या वह गति होती है जिस पर मोटर का आउटपुट टॉर्क शून्य होता है।
- टर्मिनल वोल्टेज मोटर का डिज़ाइन वोल्टेज है जो मोटर की गति निर्धारित करता है। मोटर को आपूर्ति की गई वोल्टेज को बढ़ाकर या घटाकर इस गति को नियंत्रित किया जाता है।
- घूर्णी बल जैसे टोक़ डीसी सर्वो मोटर के शाफ्ट द्वारा उत्पन्न होता है। तो, इस मोटर के लिए आवश्यक टोक़ लक्ष्य आवेदन के भीतर अनुभव किए गए विभिन्न भारों की गति-टोक़ विशेषताओं द्वारा निर्धारित किया जाता है। ये टॉर्क दो प्रकार के होते हैं स्टार्टिंग टॉर्क और कंटीन्यूअस टॉर्क।
- सर्वो मोटर को चालू करते समय शुरुआती टॉर्क आवश्यक टॉर्क है। निरंतर टोक़ की तुलना में यह टोक़ सामान्य रूप से अधिक होता है।
- निरंतर टॉर्क आउटपुट टॉर्क है जो लगातार चलने वाली परिस्थितियों में मोटर की क्षमता है।
- इन मोटरों में एप्लिकेशन के लिए पर्याप्त गति और टॉर्क क्षमता होनी चाहिए, जिसमें लोड आवश्यकताओं के बीच 20 से 30% मार्जिन के साथ-साथ विश्वसनीयता सुनिश्चित करने के लिए मोटर रेटिंग भी शामिल है। जब ये मार्जिन बहुत अधिक हो जाते हैं तो लागत की प्रभावशीलता कम हो जाएगी Faulhaber से 12V DC कोरलेस DC सर्वो मोटर के विनिर्देश हैं:
- गियरबॉक्स अनुपात 64 है: एल प्लैनेटरी थ्री स्टेज गियर बॉक्स।
- लोड करंट 1400 mA पावर है।
- शक्ति 17W है।
- स्पीड 120RPM है।
- नो लोड करंट 75mA है।
- एनकोडर का प्रकार ऑप्टिकल है।
- एनकोडर का रिज़ॉल्यूशन O/P शाफ्ट का 768CPR है।
- व्यास 30 मिमी है।
- लंबाई 42 मिमी है।
- कुल लंबाई 85 मिमी है।
- दस्ता व्यास 6 मिमी है।
- शाफ्ट की लंबाई 35 मिमी है।
- स्टाल टॉर्क 52kgcm है।
विशेषताएं
डीसी सर्वो मोटर की विशेषताएं निम्नलिखित को शामिल कीजिए।
- DC सर्वो मोटर का डिज़ाइन एक स्थायी चुंबक या अलग से उत्साहित DC मोटर के समान है।
- आर्मेचर वोल्टेज को नियंत्रित करके इस मोटर की गति को नियंत्रित किया जाता है।
- सर्वो मोटर को उच्च आर्मेचर प्रतिरोध के साथ डिज़ाइन किया गया है।
- यह त्वरित टॉर्क प्रतिक्रिया प्रदान करता है।
- आर्मेचर वोल्टेज के भीतर एक कदम परिवर्तन मोटर की गति में त्वरित परिवर्तन उत्पन्न करता है।
एसी सर्वो मोटर बनाम डीसी सर्वो मोटर
डीसी सर्वो मोटर और एसी सर्वो मोटर के बीच अंतर में निम्नलिखित शामिल हैं।
|
एसी सर्वो मोटर |
डीसी सर्वो मोटर |
| एक प्रकार का सर्वोमोटर जो यांत्रिक आउटपुट उत्पन्न करने के लिए एसी विद्युत इनपुट का उपयोग करता है उसे एसी सर्वो मोटर कहा जाता है। | एक प्रकार का सर्वोमोटर जो मैकेनिकल आउटपुट उत्पन्न करने के लिए डीसी विद्युत इनपुट का उपयोग करता है उसे डीसी सर्वो मोटर कहा जाता है। |
| एसी सर्वो मोटर कम उत्पादन शक्ति प्रदान करती है। | डीसी सर्वो मोटर उच्च उत्पादन शक्ति प्रदान करती है। |
| ये मोटर हाई-स्पीड ऑपरेटिंग परिस्थितियों के लिए समायोज्य हैं। | ये मोटर्स लो-स्पीड ऑपरेटिंग परिस्थितियों के लिए समायोज्य हैं। |
| इस प्रकार के मोटर्स उच्च टोक़ विकसित करते हैं। | इस प्रकार की मोटरें कम टॉर्क विकसित करती हैं। |
| इस मोटर का संचालन स्थिर, सुचारू और कम शोर आधारित है। | इस मोटर का संचालन कम स्थिर और शोर है। |
| इन मोटरों की दक्षता कम होती है। | इन मोटरों की उच्च दक्षता है। |
| इन मोटरों में स्थिरता की समस्या कम होती है। | इन मोटरों में स्थिरता की समस्या अधिक होती है। |
| इन मोटरों में इलेक्ट्रॉनिक शोर की समस्या नहीं होती है। | इन मोटरों में ब्रश की उपस्थिति के कारण इलेक्ट्रॉनिक शोर की समस्या होती है। |
| इन मोटरों का रखरखाव कम होता है। | ब्रश और कम्यूटेटर की उपस्थिति के कारण इन मोटरों का रखरखाव अधिक होता है। |
| ये हल्के और छोटे आकार के होते हैं। | ये भारी और बड़े आकार के होते हैं। |
| ये मोटर कम-शक्ति-आधारित अनुप्रयोगों के लिए उपयुक्त हैं। | ये मोटर उच्च-शक्ति-आधारित अनुप्रयोगों के लिए उपयुक्त हैं। |
Arduino के साथ DC सर्वो मोटर इंटरफेसिंग
डीसी सर्वो मोटर को एक सटीक और आवश्यक कोण पर नियंत्रित करने के लिए, एक Arduino बोर्ड/किसी अन्य माइक्रोकंट्रोलर का उपयोग किया जा सकता है। इस बोर्ड में एनालॉग ओ/पी है जो सर्वो मोटर को सटीक कोण पर घुमाने के लिए पीडब्लूएम सिग्नल उत्पन्न करता है। आप इमदादी मोटर के कोण की स्थिति को एक पोटेंशियोमीटर या पुश बटन के साथ Arduino का उपयोग करके भी स्थानांतरित कर सकते हैं।
सर्वो मोटर को आईआर रिमोट से भी नियंत्रित किया जा सकता है जो आसानी से उपलब्ध है। यह रिमोट डीसी सर्वो मोटर को एक विशिष्ट कोण पर ले जाने या आईआर रिमोट के साथ रैखिक रूप से मोटर के कोण को बढ़ाने या घटाने में सहायक होता है।
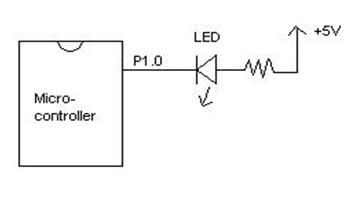
यहां हम इस बात पर चर्चा करेंगे कि एक विशिष्ट कोण पर Arduino का उपयोग करके IR रिमोट का उपयोग करके सर्वो मोटर को कैसे स्थानांतरित किया जाए और साथ ही रिमोट क्लॉकवाइज और वामावर्त के साथ सर्वो मोटर के कोण को बढ़ाया या घटाया जाए। Arduino और IR रिमोट के साथ DC सर्वो मोटर का इंटरफेसिंग आरेख नीचे दिखाया गया है। इस इंटरफेसिंग के कनेक्शन निम्नानुसार हैं;

यह इंटरफेसिंग मुख्य रूप से डीसी सर्वो मोटर, अरुडिनो बोर्ड और TSOP1738 IR सेंसर जैसे तीन आवश्यक घटकों का उपयोग करता है। इस सेंसर में Vcc, GND और आउटपुट जैसे तीन टर्मिनल हैं। इस सेंसर का Vcc टर्मिनल Arduino Uno बोर्ड के 5V से जुड़ा है, इस सेंसर का GND टर्मिनल Arduino बोर्ड के GND टर्मिनल से जुड़ा है और आउटपुट टर्मिनल Arduino बोर्ड के पिन 12 (डिजिटल इनपुट) से जुड़ा है।
डिजिटल आउटपुट पिन 5 मोटर को चलाने के लिए सर्वो मोटर के सिग्नल इनपुट पिन से जुड़ा होता है
DC सर्वो मोटर + ve पिन बाहरी 5V आपूर्ति को दिया जाता है और सर्वो मोटर का GND पिन Arduino के GND पिन को दिया जाता है।
कार्यरत
IR रिमोट का उपयोग दो क्रियाओं को 30 डिग्री, 60 डिग्री और 90 डिग्री करने के लिए किया जाता है, और मोटर के कोण को 0 से 180 डिग्री तक बढ़ाने/घटाने के लिए भी किया जाता है।
रिमोट में डिजिट बटन (0-9), एंगल कंट्रोल के लिए बटन, एरो की बटन, अप/डाउन बटन आदि जैसे कई बटन होते हैं। एक बार 1 - 5 के किसी भी अंक बटन को धकेलने के बाद, डीसी सर्वो मोटर उस पर चली जाएगी। सटीक कोण और जब एंगलअप/डाउन बटन को धक्का दिया जाता है तो मोटर का कोण बिल्कुल ±5 डिग्री पर सेट किया जा सकता है।
एक बार बटन तय हो जाने के बाद इन बटनों के कोड को डिकोड करने की जरूरत होती है। एक बार रिमोट से कोई बटन दबाया जाता है, तो यह आवश्यक कार्रवाई करने के लिए एक कोड भेजेगा। इन रिमोट कोड्स को डिकोड करने के लिए IR रिमोट लाइब्रेरी का इस्तेमाल इंटरनेट से किया जाता है।
निम्न प्रोग्राम को Arduino में अपलोड करें और IR सेंसर कनेक्ट करें। अब रिमोट को IR सेंसर की ओर रखें और बटन दबाएं। उसके बाद, सीरियल मॉनिटर खोलें और संख्याओं के रूप में दबाए गए बटन के कोड की निगरानी करें।
अरुडिनो कोड
#शामिल
#शामिल
सेवा सेवा1;
इंट आईआरपिन = 12; // आईआर सेंसर के लिए पिन
int motor_angle=0;
IRrecv इर्रेकव (IRpin);
decode_results परिणाम;
व्यर्थ व्यवस्था()
{
सीरियल.बेगिन (9600); // सीरियल कम्युनिकेशन को इनिशियलाइज़ करें
सिरियल.प्रिंट्लन ('आईआर रिमोट नियंत्रित सर्वो मोटर'); // प्रदर्शन संदेश
ircv.enableIRIn(); // रिसीवर शुरू करें
सर्वो 1.अटैच (5); // सर्वो मोटर पिन घोषित करें
सर्वो 1.राइट (मोटर_एंगल); // मोटर को 0 डिग्री पर ले जाएं
सिरियल.प्रिंट्लन ('सर्वो मोटर कोण 0 डिग्री');
देरी (2000);
}
शून्य पाश ()
{
जबकि (! (irrecv.decode (& परिणाम))); // तब तक प्रतीक्षा करें जब तक कोई बटन दबाया न जाए
if (irrecv.decode(&results)) // जब बटन दबाया जाता है और कोड प्राप्त होता है
{
if(results.value==2210) // जांचें कि अंक 1 बटन दबाया गया है या नहीं
{
सिरियल.प्रिंट्लन ('सर्वो मोटर कोण 30 डिग्री');
मोटर_कोण = 30;
सर्वो 1.राइट (मोटर_एंगल); // मोटर को 30 डिग्री पर ले जाएं
}
और if(results.value==6308) // if digit 2 बटन दबाया जाता है
{
सिरियल.प्रिंट्लन ('सर्वो मोटर कोण 60 डिग्री');
मोटर_कोण = 60;
सर्वो 1.राइट (मोटर_एंगल); // मोटर को 60 डिग्री पर ले जाएं
}
और if(results.value==2215) // इसी तरह सभी डिजिट बटन के लिए
{
सिरियल.प्रिंट्लन ('सर्वो मोटर कोण 90 डिग्री');
मोटर_कोण = 90;
सर्वो 1.राइट (मोटर_एंगल);
}
और अगर (परिणाम। मूल्य == 6312)
{
सिरियल.प्रिंट्लन ('सर्वो मोटर कोण 120 डिग्री');
मोटर_कोण = 120;
सर्वो 1.राइट (मोटर_एंगल);
}
और अगर (results.value == 2219)
{
सिरियल.प्रिंट्लन ('सर्वो मोटर कोण 150 डिग्री');
motor_angle = 150;
सर्वो 1.राइट (मोटर_एंगल);
}
और अगर (results.value == 6338) // अगर वॉल्यूम यूपी बटन दबाया जाता है
{
if(motor_angle<150) motor_angle+=5; // मोटर कोण बढ़ाएँ
सीरियल.प्रिंट ('मोटर कोण है');
सीरियल.प्रिंट्लन (मोटर_एंगल);
सर्वो 1.राइट (मोटर_एंगल); // और मोटर को उस कोण पर ले जाएँ
}
और अगर (results.value==6292) // अगर वॉल्यूम डाउन बटन दबाया जाता है
{
if(motor_angle>0) motor_angle-=5; // मोटर कोण घटाएं
सीरियल.प्रिंट ('मोटर कोण है');
सीरियल.प्रिंट्लन (मोटर_एंगल);
सर्वो 1.राइट (मोटर_एंगल); // और मोटर को उस कोण पर ले जाएँ
}
देरी (200); // 0.2 सेकंड प्रतीक्षा करें
ircv.resume (); // फिर से अगला कोड प्राप्त करने के लिए तैयार रहें
}
}
DC सर्वो मोटर को आपूर्ति बाहरी 5V से दी जाती है और IR सेंसर और Arduino बोर्ड को आपूर्ति USB से दी जाती है। सर्वो मोटर को एक बार शक्ति प्रदान करने के बाद यह 0 डिग्री पर चला जाता है। उसके बाद, सीरियल मॉनिटर पर संदेश 'सर्वो मोटर कोण 0 डिग्री है' के रूप में प्रदर्शित किया जाएगा।
अब रिमोट पर, एक बार बटन 1 दबाने पर डीसी सर्वो मोटर 30 डिग्री घूम जाएगी। इसी तरह, एक बार 2, 3, 4, या 5 जैसे बटन दबाए जाते हैं तो मोटर 60 डिग्री, 90 डिग्री, 120 डिग्री या 150 डिग्री जैसे वांछित कोणों से चलेगी। अब, सीरियल मॉनिटर सर्वो मोटर की कोण स्थिति को 'सर्वो मोटर कोण xx डिग्री' के रूप में प्रदर्शित करेगा।
एक बार वॉल्यूम अप बटन को पुश करने के बाद, मोटर का कोण 5 डिग्री बढ़ जाएगा जिसका मतलब है कि अगर यह 60 डिग्री है, तो यह 65 डिग्री तक चला जाएगा। तो, सीरियल मॉनीटर पर नए कोण की स्थिति प्रदर्शित की जाएगी।
इसी तरह, एक बार एंगल डाउन बटन को धक्का देने के बाद, मोटर का कोण 5 डिग्री कम हो जाएगा, जिसका मतलब है कि अगर कोण 90 डिग्री है, तो यह 85 डिग्री तक चला जाएगा। आईआर रिमोट से सिग्नल आईआर सेंसर द्वारा महसूस किया जाता है। यह कैसे सेंस करता है और आईआर सेंसर कैसे काम करता है, यह जानने के लिए क्लिक करें यहां
तो, सीरियल मॉनीटर पर नए कोण की स्थिति प्रदर्शित की जाएगी। इसलिए, हम Arduino और IR रिमोट के साथ dc सर्वो मोटर के कोण को आसानी से नियंत्रित कर सकते हैं।
डीसी मोटर को 8051 माइक्रोकंट्रोलर के साथ इंटरफेस करने के बारे में जानने के लिए क्लिक करें यहां
डीसी सर्वो मोटर के लाभ
डीसी सर्वो मोटर्स के फायदे निम्नलिखित को शामिल कीजिए।
- डीसी सर्वो मोटर ऑपरेशन स्थिर है।
- इन मोटरों में मोटर के आकार और वजन की तुलना में बहुत अधिक उत्पादन शक्ति होती है।
- जब ये मोटर तेज गति से चलती हैं तो ये कोई शोर उत्पन्न नहीं करती हैं।
- यह मोटर ऑपरेशन कंपन और अनुनाद मुक्त है।
- इस प्रकार की मोटरों में जड़त्व अनुपात के लिए उच्च टोक़ होता है और वे बहुत जल्दी भार उठा सकते हैं।
- उनकी उच्च दक्षता है।
- वे त्वरित प्रतिक्रियाएँ देते हैं।
- ये पोर्टेबल और हल्के हैं।
- चार चतुर्भुजों का संचालन संभव है।
- उच्च गति पर, ये श्रव्य रूप से शांत होते हैं।
डीसी सर्वो मोटर्स के नुकसान निम्नलिखित को शामिल कीजिए।
- डीसी सर्वो मोटर का शीतलन तंत्र अक्षम है। इसलिए यह मोटर हवादार होते ही जल्दी प्रदूषित हो जाती है।
- यह मोटर उच्च टॉर्क गति पर अधिकतम आउटपुट पावर उत्पन्न करती है और नियमित गियरिंग की आवश्यकता होती है।
- ओवरलोड होने से इन मोटरों को नुकसान हो सकता है।
- उनके पास एक जटिल डिजाइन है और एक एनकोडर की जरूरत है।
- फीडबैक लूप को स्थिर करने के लिए इन मोटरों को ट्यूनिंग की आवश्यकता होती है।
- इसके रखरखाव की आवश्यकता है।
डीसी सर्वो मोटर अनुप्रयोग
डीसी सर्वो मोटर्स के अनुप्रयोग निम्नलिखित को शामिल कीजिए।
- धातु को काटने और बनाने के लिए डीसी सर्वो मोटर्स का उपयोग मशीन टूल्स में किया जाता है।
- इनका उपयोग ऐन्टेना पोजिशनिंग, प्रिंटिंग, पैकेजिंग, वुडवर्किंग, टेक्सटाइल्स, सुतली या रस्सी के निर्माण, सीएमएम (समन्वय मापने वाली मशीन), सामग्री को संभालने, फर्श को चमकाने, दरवाजे खोलने, एक्स-वाई टेबल, चिकित्सा उपकरण और वेफर कताई के लिए किया जाता है।
- इन मोटरों का उपयोग विमान नियंत्रण प्रणालियों में किया जाता है जहां अंतरिक्ष और वजन की सीमाओं को प्रत्येक इकाई मात्रा के लिए उच्च शक्ति प्रदान करने के लिए मोटर्स की आवश्यकता होती है।
- ये उन जगहों पर लागू होते हैं जहां ब्लोअर ड्राइव और पंखे की तरह उच्च स्टार्टिंग टॉर्क आवश्यक है।
- इनका उपयोग मुख्य रूप से रोबोटिक्स, प्रोग्रामिंग डिवाइस, इलेक्ट्रोमैकेनिकल एक्चुएटर्स, मशीन टूल्स, प्रोसेस कंट्रोलर्स आदि के लिए भी किया जाता है।
इस प्रकार, यह डीसी का अवलोकन है सर्वो मोटर - काम कर रहा है अनुप्रयोगों के साथ। कई यांत्रिक आंदोलनों का समाधान प्रदान करने के लिए इन सर्वो मोटर्स का उपयोग विभिन्न उद्योगों में किया जाता है। इन मोटरों की विशेषताएं उन्हें बहुत कुशल और शक्तिशाली बनाती हैं। यहाँ आपके लिए एक प्रश्न है, एसी सर्वो मोटर क्या है?