लेख में साधारण भागों जैसे 4017 IC और 555 IC का उपयोग करते हुए एक साधारण इन्फ्रारेड नियंत्रित फैन रेगुलेटर या डिमर सर्किट की चर्चा की गई है।
सर्किट ऑपरेशन
दिखाए गए रिमोट नियंत्रित फैन डिमर सर्किट का उल्लेख करते हुए, तीन मुख्य चरणों को शामिल किया जा सकता है: आईसी का उपयोग करके इन्फ्रारेड सिग्नल सेंसर चरण TSOP1738 जॉनसन के दशक के काउंटर, IC 4017 का उपयोग कर सीक्वेंसर और IC 555 का उपयोग करते हुए एक PWM प्रोसेसर स्टेज।

सर्किट के भीतर शामिल विभिन्न कार्यों को निम्नलिखित बिंदुओं की मदद से समझा जा सकता है:
जब एक इन्फ्रारेड बीम सेंसर पर केंद्रित होता है, तो सेंसर इसके जवाब में एक कम तर्क उत्पन्न करता है, जिसके कारण PNP BC557 का संचालन होता है।
सेंसर TSOP1738 का उपयोग करना
यहां उपयोग किया जाने वाला सेंसर TSOP1738 है, आप इसमें इसके बारे में अधिक जान सकते हैं सरल आईआर रिमोट कंट्रोल लेख
IR बीम के जवाब में BC557 ट्रांजिस्टर का प्रवाह IC 4017 के पिन 14 को सकारात्मक आपूर्ति को जोड़ता है जिसे IC द्वारा घड़ी नाड़ी के रूप में स्वीकार किया जाता है।
यह घड़ी पल्स आईसी 4017 के दिखाए गए आउटपुट में अनुक्रम में अगले पिनआउट से मौजूदा पिनआउट से एक उच्च तर्क के एकल अनुक्रमिक हॉप में अनुवादित है।
इस क्रमिक स्थानांतरण या एक उच्च लॉजिक पल्स की एक पिन से अगली आउटपुट के लिए पूरे आउटपुट में पिन # 3 से पिन # 10 तक और पीछे आईआर रिमोट हैंडसेट द्वारा IR सेंसर पर केंद्रित प्रत्येक क्षणिक किरण के जवाब में किया जाता है।
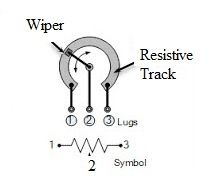
वोल्टेज डिवाइडर को नियंत्रित करने के लिए आईसी 4017 का उपयोग करना
हम देख सकते हैं कि आईसी 4017 आउटपुट में ठीक गणना वाले प्रतिरोधों का एक सेट होता है जिनके बाहरी मुक्त छोरों को छोटा किया जाता है और 1K रोकनेवाला के माध्यम से जमीन से जुड़ा होता है।
उपरोक्त विन्यास एक प्रतिरोधक संभावित विभक्त बनाता है जो कि उपर्युक्त विवरण में चर्चा किए गए अनुसार आउटपुट में उच्च लॉगिक्स के स्थानांतरण के जवाब में नोड 'ए' पर एक क्रमिक वृद्धि या ड्रॉपिंग संभावित स्तर उत्पन्न करता है।
इस बदलती क्षमता को एक एनपीएन ट्रांजिस्टर के आधार पर समाप्त किया जाता है, जिसका एमिटर आईसी 555 के पिन # 5 से जुड़ा देखा जा सकता है जिसे उच्च आवृत्ति के रूप में कॉन्फ़िगर किया गया है।
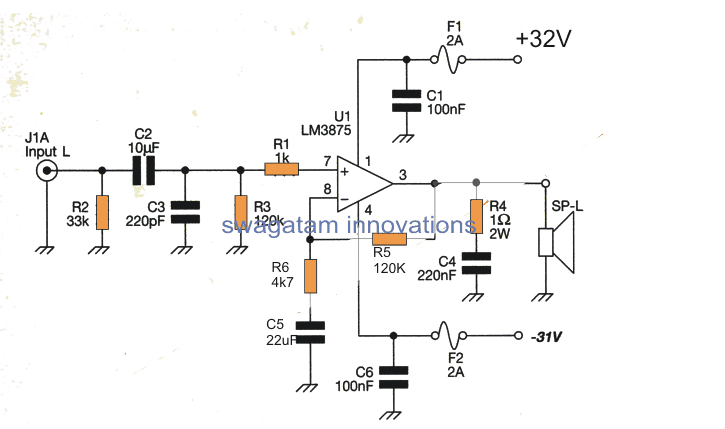
PWM जनरेटर के रूप में IC 555 का उपयोग करना
555 चरण मूल रूप से PWM जनरेटर की तरह काम करता है जो आनुपातिक रूप से बदलता है क्योंकि इसका पिन # 5 संभावित विविध है। अलग-अलग PWM इसके पिन # 3 पर बनाए जाते हैं।
डिफ़ॉल्ट रूप से पिन # 5 एक 1K रोकनेवाला के साथ जुड़ा होता है, जो यह सुनिश्चित करता है कि जब पिन पर कोई वोल्टेज या न्यूनतम वोल्टेज न हो, तो इसके पिन # 3 पर अत्यंत संकीर्ण PWM में # 5 परिणाम और इसके पिन # 5 पर संभावित या वोल्टेज के रूप में। पीडब्लूएम में वृद्धि हुई है और आनुपातिक रूप से चौड़ाई भी बढ़ी है। चौड़ाई अधिकतम होती है जब पिन # 5 पर संभावित इसके पिन के Vcc के 2 / 3rd # 4/8 तक पहुंच जाता है।
अब जाहिरा तौर पर, एनपीएन के आधार पर एक अलग वोल्टेज बनाने वाले आईसी 4017 शिफ्ट से आउटपुट के अनुसार, अलग-अलग वोल्टेज की एक समान मात्रा को IC 555 के पिन # 5 पर स्थानांतरित किया जाता है, जो बदले में पिन के अनुसार तदनुसार परिवर्तित PWM में परिवर्तित हो जाता है। # आईसी के 3।
चूँकि IC का पिन # 3 एक triac के द्वार से जुड़ा होता है, triac का चालन आनुपातिक रूप से उच्च से निम्न में प्रभावित होता है और इसके द्वार पर बदलते PWM के जवाब में विपरीत होता है।
यह प्रभावी रूप से एक वांछित गति नियंत्रण या तिकड़ी के एमटी 1 और एसी मेन्स इनपुट में जुड़े पंखे के उचित नियमन में परिवर्तित हो जाता है।
इस प्रकार सर्किट की संबद्ध आईआर सेंसर पर टॉगल अवरक्त अवरक्त किरणों की प्रतिक्रिया में पंखे की गति धीमी से धीमी और इसके विपरीत तेज हो जाती है।
सर्किट कैसे सेट करें।
यह निम्नलिखित चरणों की मदद से किया जा सकता है:
प्रारंभ में BC547 ट्रांजिस्टर के उत्सर्जक को IC555 के पिन # 5 से काट दिया।
अब दो चरणों (आईसी 4017 और आईसी 555) को एक दूसरे से अलग माना जा सकता है।
पहले आईसी 555 चरण की जाँच निम्न तरीके से करें:
पिन # 5 और ग्राउंड पर 1K रोकनेवाला को डिस्कनेक्ट करने से पंखे की गति अधिकतम तक बढ़नी चाहिए, और इसे वापस जोड़ने से इसे न्यूनतम तक घटाना चाहिए।
उपरोक्त IC 555 PWM चरण के सही काम की पुष्टि करेगा।
50k प्रीसेट सेटिंग महत्वपूर्ण नहीं है और प्रीसेट रेंज के लगभग केंद्र पर सेट की जा सकती है।
हालांकि, कैपेसिटर 1nF का उपयोग सर्वोत्तम संभव परिणाम प्राप्त करने के लिए किया जा सकता है। 10uF तक के उच्च मूल्यों की कोशिश की जा सकती है और परिणामों को सबसे अनुकूल प्रशंसक गति विनियमन प्राप्त करने के लिए निगरानी की जाती है।
इसके बाद, हमें यह जांचने की जरूरत है कि सर्किट 'के IR सेंसर पर IR रिमोट बीम के प्रत्येक दबाने पर' A 'में IC 4017 आउटपुट नोड 1V से 10V तक एक अलग वोल्टेज बनाता है या नहीं।
यदि उपरोक्त स्थिति पूरी होती है, तो हम चरण को सही ढंग से कार्य करने के लिए मान सकते हैं, और अब BC547 के emitter को IR रिमोट हैंडसेट का उपयोग करके पंखे की गति विनियमन के अंतिम परीक्षण के लिए IC555 के पिन # 5 के साथ एकीकृत किया जा सकता है।
रिमोट हैंडसेट कोई भी टीवी रिमोट कंट्रोल हो सकता है जिसे हम सामान्य रूप से अपने घरों में उपयोग करते हैं।
यदि उपरोक्त डिज़ाइन एक जुड़े हुए पंखे के साथ सुचारू रूप से काम नहीं करता है, तो नीचे दिए गए परिणामों को सुधारने के लिए थोड़े संशोधन से गुजरना पड़ सकता है:

रिमोट हैंडसेट के माध्यम से एक परेशानी मुक्त और स्वच्छ प्रशंसक नियंत्रण को लागू करने के लिए सर्किट MOC3031 triac ड्राइवर चरण की मदद लेता है।
परीक्षण विश्लेषण
उपरोक्त सर्किट का परीक्षण करने पर, परिणाम काफी संतोषजनक नहीं थे, क्योंकि पंखे को सबसे कम सीमा तक नियंत्रित नहीं किया जा सकता था और इसने कुछ कंपन दिखाया।
डिजाइन का विश्लेषण करने से पता चला है कि triac पर PWM का आवेदन समस्या पैदा कर रहा था क्योंकि triacs DC PWM के लिए अच्छी तरह से प्रतिक्रिया नहीं देते हैं, बल्कि एसी चरण चॉपिंग में बेहतर प्रतिक्रिया दिखाते हैं जैसा कि डिमर स्विच में इस्तेमाल किया जाता है
PWM के बजाय चरण नियंत्रण का उपयोग करना
इस लेख में चर्चा की गई सर्किट पंखा डिमिंग नियंत्रण के लिए पीडब्लूएम विचार को समाप्त कर देता है, इसके बजाय कनेक्टेड पंखे मोटर पर डिमिंग या तेज प्रभाव को क्रमिक रूप से लागू करने के लिए कुछ कम पावर ट्राइक को रोजगार देता है।
प्रस्तावित रिमोट नियंत्रित फैन डिमर सर्किट के लिए पूरा डिजाइन नीचे देखा जा सकता है:
सर्किट आरेख

नोट: 4 SCR को SCR BT169 के रूप में गलत तरीके से दर्शाया गया है, इन्हें ट्रिक के साथ प्रतिस्थापित किया जाना चाहिए, जैसे BCR1AM-8P triacs, या कोई अन्य समान triac भी करेगा।
यह काम किस प्रकार करता है
ऊपर दिए गए चित्र का जिक्र करते हुए हम दो सर्किटों को एक दो अलग-अलग चरणों में देख सकते हैं।
आरेख के दाईं ओर एक के रूप में कॉन्फ़िगर किया गया है मानक प्रकाश डिमर या फैन डिमर सर्किट , एक परिवर्तन को छोड़कर, जिसे इसके सामान्य पॉट सेक्शन के पास देखा जा सकता है, जहां इसे अपने MT2 पर चार अलग-अलग अवरोधक वाले चार triacs के साथ बदल दिया गया है, एक वृद्धिशील मूल्यों के साथ व्यवस्थित किया गया है।
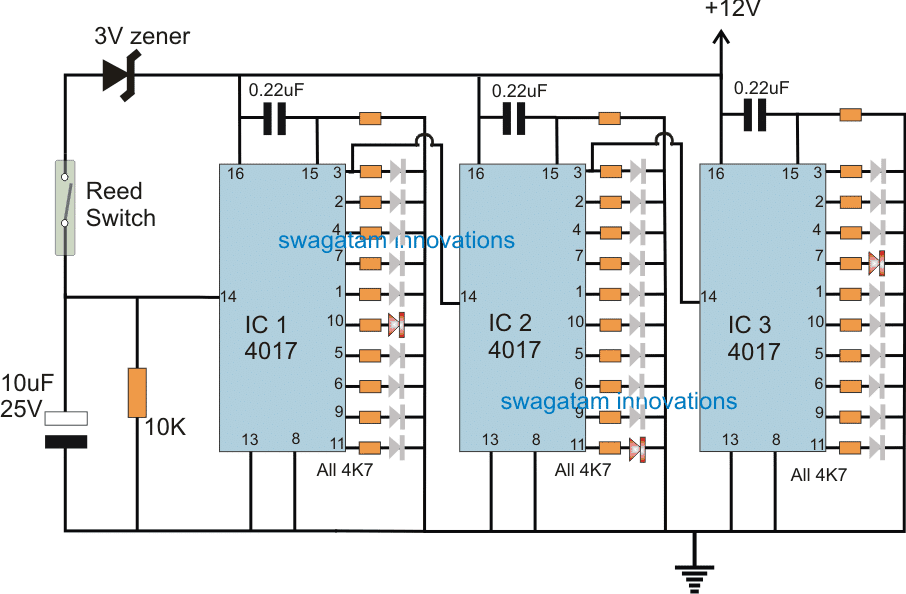
बाईं ओर के चरण में IC 4017 शामिल है, जिसे 4 चरण अनुक्रमिक तर्क जनरेटर के रूप में वायर्ड किया गया है, जो एक इन्फ्रारेड सेंसर इकाई द्वारा ट्रिगर किया गया है जो आईआर रिसीवर को एक हाथ से संचालित आईआर रिमोट कंट्रोल यूनिट से स्विचिंग ट्रिगर प्राप्त करने के लिए बनाता है।
वैकल्पिक आईआर ट्रांसमीटर से रिमोट आईआर बीम आईआरएस के कारण आईसी 4017 के पिन # 14 पर एक टॉसिंग पल्स उत्पन्न होता है, जो बदले में पल्स को क्रमिक रूप से शिफ्टिंग लॉजिक हाई पल्स में अपने पिन # 3 से पिन # 10 में परिवर्तित करता है जिसके बाद इसे पिन से # 3 पर वापस रीसेट करना होता है। # 1/15 बातचीत।
उपर्युक्त पिनआउट जो क्रमिक रूप से यात्रा करने वाले तर्क उच्च नाड़ी उत्पन्न करने के लिए जिम्मेदार हैं, क्रमिक रूप से संकेतित त्रिक के द्वार ए, बी, सी, डी के साथ जुड़े हुए हैं।
चूंकि triacs के एनोड से जुड़े प्रतिरोधक पंखे की गति सीमा के लिए निर्धारण घटक बन जाते हैं, तात्पर्य यह है कि क्रमिक रूप से triacs को बदलकर और fro करके, पंखे की गति को अनुपात में 4 सेंटी चरणों में बढ़ाया या घटाया जा सकता है, यह निर्भर करता है R4 ---- R8 के मान।
इसलिए जब रिमोट हैंडसेट बटन दबाया जाता है, तो IC 4017 पिनआउट्स संबंधित तिकड़ी को ट्रिगर करता है जो बदले में अपने एनोड रेसिस्टर को डिमेरर ट्रायाक / डियाक कॉन्फ़िगरेशन के साथ जोड़ता है, जिससे फैन स्पीड की प्रासंगिक राशि निष्पादित होती है।
प्रस्तावित रिमोट नियंत्रित फैन डिमर सर्किट में, 4 ट्राएक्स को 4-स्टेप गति नियंत्रण के उत्पादन के लिए दिखाया गया है, हालांकि, 10 ऐसे ट्राएक्स को आईसी 10 के सभी 10 पिनआउट के साथ लागू किया जा सकता है, जो एक अच्छा 10 कदम विवेकपूर्ण नियंत्रित गति विनियमन प्राप्त करने के लिए है।
हिस्सों की सूची
R1, R3 = 100 ओम, R2 = 100K, R4 = 4K7, R5 = 10K,
C2 = 47uF / 25VC1, C4 = 22uF / 25V, C6 = 4.7uF / 25V,
C3 = 0.1, CERAMIC
C5 = 100uF / 50V
C10 = 0.22uF / 400V
T1 = BC557
आईआरएस = TSOP IR सेंसर
IC1 = 4017 IC
डी 1 = 1 एन 4007
डी 2 = 12 वी 1watt जेनर
R9 = 15K
R10 = 330K
R4 --- R8 = 50K, 100K। 150K, 220K
R11 = 33K
आर 12 = 100 ओम
Diac = DB-3
TR1 = BT136
किसी भी लोहे के बोल्ट पर 28SWG का L1 = 500 मोड़।
C7 = 0.1uF / 600V
चेतावनी: समयसीमा मुख्य रूप से मुख्य एसी के साथ जुड़ा हुआ है, बाहरी स्थिति का पता लगाया गया है जो शक्तिशाली स्थिति में स्थित है।
की एक जोड़ी: समय पर रिवर्स फॉरवर्ड कार्रवाई के साथ खिलौना मोटर सर्किट अगला: जल प्रवाह वाल्व टाइमर नियंत्रक सर्किट