पोस्ट एक कस्टम औद्योगिक तंत्र को नियंत्रित करने के लिए एक प्रोग्राम योग्य द्विदिश मोटर टाइमर सर्किट की व्याख्या करता है। श्री मिल्टन द्वारा इस विचार का अनुरोध किया गया था
तकनीकी निर्देश
मैं एक ग्लास विशेषज्ञ हूं, जो DIY आदि के साथ बहुत अच्छा हूं, लेकिन इलेक्ट्रिक्स पर बहुत गर्म नहीं है। मैं एक 10 मिमी कड़े ग्लास वॉच डिस्प्ले बॉक्स के लिए एक निर्माण की योजना बना रहा हूं, हालांकि हमारे ग्राहक इसे वॉच वाइन्डर बॉक्स बनाना चाहेंगे।
मैंने स्थापित किया है कि हमें एक साथ चलने के लिए 4 x 10rpm 24V AC मोटर्स की आवश्यकता है। उन्हें हर घंटे शुरू करने की आवश्यकता है, 15-20 मिनट के लिए।
हालांकि, उन्हें दक्षिणावर्त और फिर घंटे के समय तक दक्षिणावर्त घूमना पड़ता है। यह अच्छा होगा अगर मैं भी मोटरों को शुरू करने और रोकने के लिए एक मैनुअल विकल्प रख सकता हूं जब मैं चाहता था।
क्या यह कोई ऐसी चीज है जिससे कोई मदद कर सकता है? कृप्या?
धन्यवाद!
मिल्टन
परिरूप
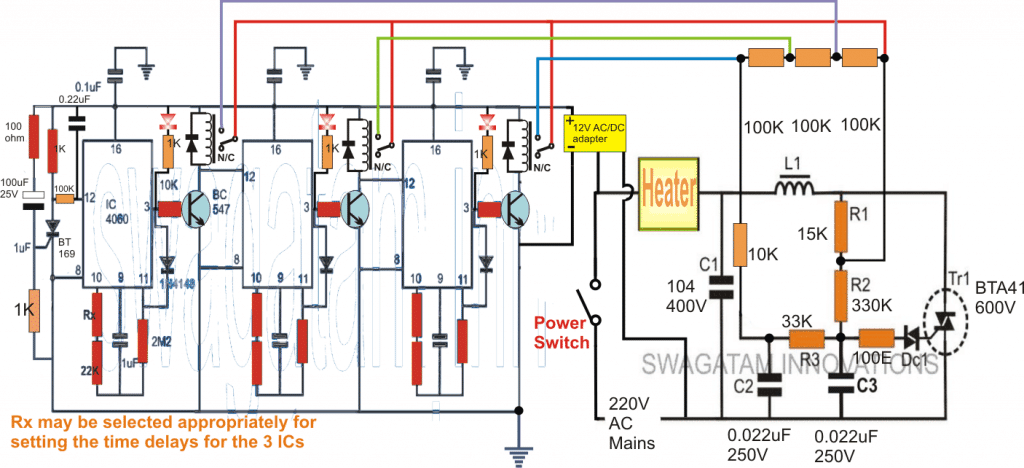
प्रस्तावित सर्किट को निम्नलिखित विवरण के साथ समझा जा सकता है:
दो 4060 ICs वाले चरण को प्रोग्रामेबल स्टेज के रूप में कॉन्फ़िगर किया गया है। ऊपरी 4060 IC को ऑफ टाइमर सर्किट के रूप में वायर्ड किया जाता है जबकि निचला IC सर्किट के ON को तय करता है।
आईसी 4017 के दाहिने हाथ की ओर वाला खंड एक मानक फ्लिप फ्लॉप सर्किट बनाता है जो इसके उत्पादन को 3 से 2 तक बढ़ाता है और इसके पिन # 14 पर प्रत्येक उच्च ट्रिगर के जवाब में इसके विपरीत होता है।
जब बिजली चालू होती है, तो ऊपरी 4060 की गिनती शुरू होती है। यह चरण निर्धारित समय के अनुसार 20 मिनट की देरी से उत्पादन के लिए निर्धारित किया जा सकता है।
एक ही समय में IC4017 का पिन # 3 उच्च तर्क उत्पन्न करता है क्योंकि यह IC4017 का प्रारंभ पिन है। कनेक्टेड मोटर अब रिले के साथ इसकी ध्रुवता के आधार पर एक विशेष दिशा में घूमना शुरू कर देती है।
सेट के 20 मिनट के बाद, समय समाप्त हो जाता है, ऊपरी 4060 का पिन # 3 उच्च हो जाता है जो निचले 4060 को आरंभ करता है।
यह 4060 से उच्चतर 0.22uF संधारित्र के माध्यम से IC4017 के पिन 14 पर एक तर्क उच्च ट्रिगर को लागू करता है जो इसके आउटपुट को पिन 3 से पिन 2 तक हॉप करने के लिए मजबूर करता है।
पिन 2/7 चालक चरण में रिले अब मोटर की आपूर्ति को काटने और इस प्रकार मोटर को बंद करने को सक्रिय करता है।
लगभग 1 घंटे के बाद, जिसे निचले आईसी 4060 के साथ निर्दिष्ट अंतराल सेट किया जाना चाहिए, इसका पिन # 3 उच्च हो जाता है और तुरंत ऊपरी IC4060 को रीसेट करता है ताकि यह पिछले मोड में बदल जाए।
इस प्रक्रिया में, यह IC4017 भी टॉगल करता है, ताकि इसका आउटपुट पिन 2 से पिन 4 में बदल जाए, पिन 4 पर रिले बहाल हो जाए और मोटर घूमने लगे लेकिन अब विपरीत दिशा में।
अगले 20 मिनट तक मोटर घूमता रहता है जिसके बाद IC 4017 के अनुक्रम से ऊपर pin7 तक जाता है और मोटर फिर से रुक जाती है।
निचले 4060 आईसी से बाद के बाद के ट्रिगर के साथ, सिस्टम अपनी प्रारंभिक स्थिति में बदल जाता है और अनुरोध में प्रस्तावित चक्र दोहराता रहता है।
सर्किट आरेख

की एक जोड़ी: पोल्ट्री फीड कंट्रोलर टाइमर सर्किट अगला: तस्वीर ट्यूटोरियल- रजिस्टरों से इंटरप्ट तक






![24 वी से 12 वी डीसी कनवर्टर सर्किट [स्विचिंग रेगुलेटर का उपयोग करके]](https://electronics.jf-parede.pt/img/3-phase-power/F1/24-v-to-12-v-dc-converter-circuit-using-switching-regulator-1.jpg)