प्रस्तुत 3 चरण VFD सर्किट ( मेरे द्वारा डिज़ाइन किया गया ) किसी भी तीन चरण ब्रश एसी मोटर या यहां तक कि एक ब्रश रहित एसी मोटर की गति को नियंत्रित करने के लिए इस्तेमाल किया जा सकता है। श्री टॉम द्वारा विचार का अनुरोध किया गया था
VFD का उपयोग करना
प्रस्तावित 3-चरण VFD सर्किट को सार्वभौमिक रूप से अधिकांश 3-चरण एसी मोटर्स के लिए लागू किया जा सकता है जहां विनियमन दक्षता बहुत महत्वपूर्ण नहीं है।
इसे विशेष रूप से नियंत्रित करने के लिए इस्तेमाल किया जा सकता है गिलहरी पिंजरे प्रेरण मोटर गति एक खुले लूप मोड के साथ, और संभवतः बंद लूप मोड में भी जिसे लेख के बाद के भाग में चर्चा की जाएगी।
3 चरण इन्वर्टर के लिए आवश्यक मॉड्यूल
प्रस्तावित 3 चरण VFD या चर आवृत्ति ड्राइव सर्किट को डिजाइन करने के लिए निम्नलिखित मूलभूत सर्किट चरणों की अनिवार्य रूप से आवश्यकता होती है:
- PWM वोल्टेज नियंत्रक सर्किट
- 3 चरण उच्च पक्ष / कम पक्ष एच-पुल चालक सर्किट
- 3 चरण जनरेटर सर्किट
- V / Hz पैरामीटर उत्पन्न करने के लिए वोल्टेज से आवृत्ति कनवर्टर सर्किट।
आइए निम्नलिखित स्पष्टीकरण की मदद से उपरोक्त चरणों के कामकाज का विवरण जानें:
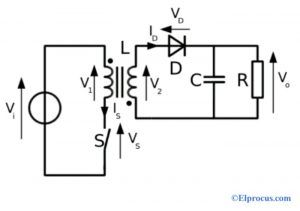
एक साधारण पीडब्लूएम वोल्टेज नियंत्रक सर्किट को नीचे दिए गए आरेख में देखा जा सकता है:

PWM नियंत्रक
मैंने उपरोक्त PWM जनरेटर स्टेज के कामकाज को पहले ही शामिल कर लिया है और समझाया है जो मूल रूप से एक ही IC के pin5 पर लागू की गई प्रतिक्रिया के लिए IC2 के pin3 में एक अलग PWM आउटपुट उत्पन्न करने के लिए बनाया गया है।
आरेख में दिखाया गया 1K प्रीसेट आरएमएस कंट्रोल नॉब है, जिसे आगे की प्रक्रिया के लिए IC2 के पिन 3 पर PWM के रूप में आउटपुट वोल्टेज की वांछित आनुपातिक मात्रा प्राप्त करने के लिए उचित रूप से समायोजित किया जा सकता है। यह एक संबंधित आउटपुट का उत्पादन करने के लिए निर्धारित है जो मुख्य 220V या 120V AC RMS के बराबर हो सकता है।
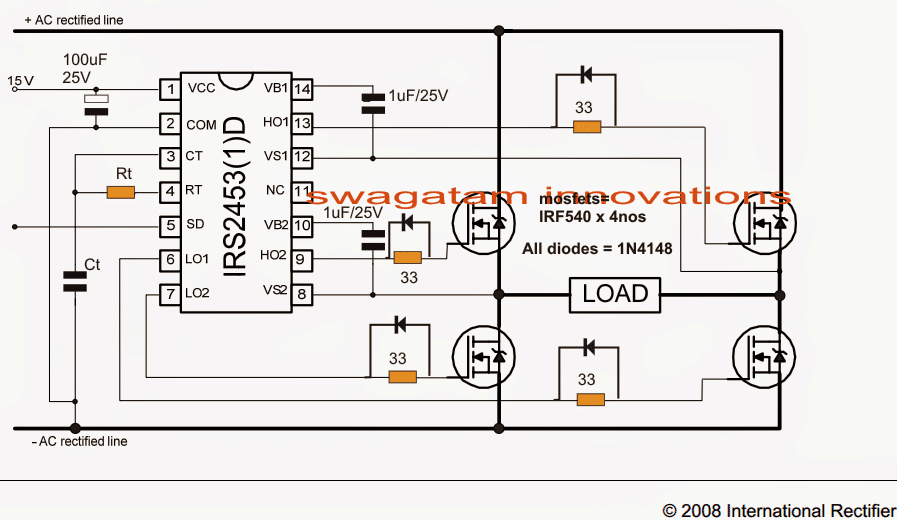
एच-ब्रिज ड्राइवर सर्किट
नीचे दिए गए अगले चित्र में आईसी IRS2330 का उपयोग करते हुए एक एकल चिप एच-ब्रिज 3 चरण ड्राइवर सर्किट दिखाया गया है।
डिजाइन सीधा दिखता है क्योंकि अधिकांश जटिलताएं इन-बिल्ट परिष्कृत सर्किटरी द्वारा चिप्स के द्वारा नियंत्रित की जाती हैं।
एक अच्छी तरह से गणना की गई 3 चरण संकेत 3 चरण सिग्नल जनरेटर चरण के माध्यम से आईसी के HIN1 / 2/3 और LIN1 / 2/3 इनपुट भर में लागू किया जाता है।
के आउटपुट आईसी IRS2330 6 मस्जिदों या IGBTs पुल नेटवर्क के साथ एकीकृत देखा जा सकता है, जिनकी नालियों को उचित रूप से मोटर के साथ कॉन्फ़िगर किया जाता है जिसे नियंत्रित करने की आवश्यकता होती है।
निम्न पक्ष वाले mosfet / IGBT फाटकों को ब्रिज मस्जिद चरण में PWM इंजेक्शन आरंभ करने के लिए उपरोक्त चर्चा किए गए PWM जनरेटर सर्किट चरण के IC2 पिन # 3 के साथ एकीकृत किया गया है। यह विनियमन अंततः मोटर को सेटिंग्स के अनुसार वांछित गति प्राप्त करने में मदद करता है (पहले आरेख में 1 k पूर्व निर्धारित के माध्यम से)।

निम्नलिखित आरेख में हम आवश्यक 3 चरण सिग्नल जनरेटर सर्किट की कल्पना करते हैं।

3-चरण जनरेटर सर्किट को कॉन्फ़िगर करना
3 चरण जनरेटर का निर्माण सीएमओएस चिप्स CD4035 और CD4009 के एक जोड़े के आसपास किया गया है, जो दिखाए गए पिनआउट में 3 चरण संकेतों को सटीक रूप से आयामित करता है।
3 चरण के संकेतों की आवृत्ति फीड किए गए इनपुट घड़ियों पर निर्भर करती है जो कि 3 चरण के संकेत से 6 गुना होनी चाहिए। मतलब, यदि आवश्यक 3 चरण आवृत्ति 50 हर्ट्ज है, तो इनपुट घड़ी 50 x 6 = 300 हर्ट्ज होनी चाहिए।
इसका मतलब यह भी है कि ड्राइवर आईसी की प्रभावी आवृत्ति को अलग करने के लिए उपरोक्त घड़ियों को विविध किया जा सकता है जो बदले में मोटर परिचालन आवृत्ति को अलग करने के लिए जिम्मेदार होगा।
हालाँकि, उपरोक्त आवृत्ति परिवर्तन के लिए अलग-अलग वोल्टेज के जवाब में स्वचालित होने की आवश्यकता होती है, आवृत्ति कनवर्टर के लिए एक वोल्टेज आवश्यक हो जाता है। अगला चरण आवश्यक कार्यान्वयन के लिए आवृत्ति कनवर्टर सर्किट के लिए एक सरल सटीक वोल्टेज पर चर्चा करता है।
लगातार V / F अनुपात कैसे बनाएँ
आमतौर पर प्रेरण मोटर्स में, मोटर गति और टॉक की एक इष्टतम दक्षता बनाए रखने के लिए, स्लिप गति या रोटर गति को नियंत्रित करने की आवश्यकता होती है जो बदले में निरंतर वी / हर्ट्ज अनुपात बनाए रखने से संभव हो जाता है। चूंकि स्टेटर चुंबकीय प्रवाह इनपुट आपूर्ति आवृत्ति की परवाह किए बिना हमेशा स्थिर होता है, रोटर की गति आसानी से नियंत्रित हो जाती है V / Hz अनुपात को स्थिर बनाए रखना ।
एक खुले लूप मोड में, यह पूर्व निर्धारित V / Hz अनुपात को बनाए रखने और इसे मैन्युअल रूप से कार्यान्वित करके मोटे तौर पर किया जा सकता है। उदाहरण के लिए पहले आरेख में यह उपयुक्त रूप से R1 और 1K प्रीसेट को समायोजित करके किया जा सकता है। R1 आवृत्ति निर्धारित करता है और 1K आउटपुट के RMS को समायोजित करता है, इसलिए उपयुक्त रूप से दो मापदंडों को समायोजित करके हम आवश्यक मात्रा V / Hz को मैन्युअल रूप से लागू कर सकते हैं।
हालांकि इंडक्शन मोटर टॉर्क और गति का अपेक्षाकृत सटीक नियंत्रण प्राप्त करने के लिए, हमें एक बंद लूप रणनीति को लागू करना होगा, जिसमें स्लिप स्पीड डेटा को वी / हर्ट्ज अनुपात के एक स्वचालित समायोजन के लिए प्रोसेसिंग सर्किट में फीड करना होगा ताकि यह हो सके मूल्य हमेशा स्थिर के बारे में रहता है।
बंद लूप फीडबैक को लागू करना
इस पृष्ठ पर पहले आरेख को बंद लूप स्वचालित वी / हर्ट्ज विनियमन को डिजाइन करने के लिए उपयुक्त रूप से संशोधित किया जा सकता है जैसा कि नीचे दिखाया गया है:

उपरोक्त आंकड़े में, IC2 के पिन # 5 की क्षमता SPWM की चौड़ाई निर्धारित करती है जो समान IC के पिन # 3 पर उत्पन्न होती है। SPWM पिन # 5 पर मुख्य 12V तरंग नमूने की तुलना IC2 के पिन # 7 पर त्रिभुज तरंग से की जाती है, और इसे मोटर नियंत्रण के लिए कम साइड वाले मच्छरों को खिलाया जाता है।
प्रारंभ में यह एसपीडब्लूएम कुछ समायोजित स्तर (1K पर्सेट का उपयोग करके) पर सेट किया गया है जो निर्दिष्ट नाममात्र गति स्तर पर रोटर आंदोलन को शुरू करने के लिए 3-चरण पुल के निम्न साइड आईजीबीटी गेट को ट्रिगर करता है।
जैसे ही रोटर रोटर घूमना शुरू करता है, रोटर तंत्र के साथ संलग्न टैकोमीटर आईसी 2 के पिन # 5 पर विकसित करने के लिए आनुपातिक अतिरिक्त मात्रा का कारण बनता है, यह आनुपातिक रूप से एसपीडब्लूएम को व्यापक बनाता है जिससे मोटर के स्टूल कॉयल को अधिक वोल्टेज मिलता है। यह IC2 के पिन # 5 पर अधिक वोल्टेज पैदा करने वाले रोटर की गति में और वृद्धि का कारण बनता है, और यह तब तक चलता है जब तक SPWM समतुल्य वोल्टेज नहीं बढ़ पाता है और स्टेटर रोटर सिंक्रोनाइज़ेशन एक स्थिर-अवस्था प्राप्त कर लेता है।
उपरोक्त प्रक्रिया मोटर की परिचालन अवधि के दौरान स्व-समायोजन पर चलती है।
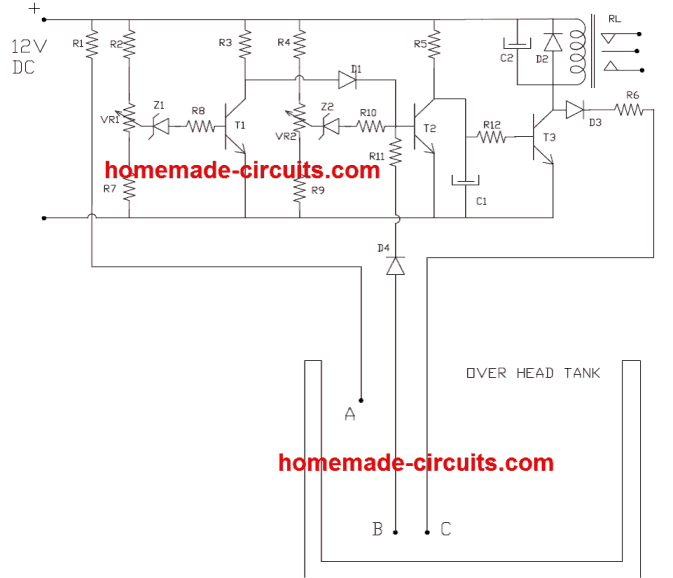
टैकोमीटर कैसे बनाएं और एकीकृत करें
एक साधारण टैकोमीटर डिज़ाइन को निम्न चित्र में देखा जा सकता है, इसे रोटर तंत्र के साथ एकीकृत किया जा सकता है जैसे कि घूर्णी आवृत्ति बीसी 547 के आधार को खिलाने में सक्षम है।

यहां रोटर स्पीड डेटा को हॉल इफेक्ट सेंसर या IR LED / सेंसर नेटवर्क से एकत्र किया जाता है और इसे T1 के आधार पर फीड किया जाता है।
इस आवृत्ति पर T1 दोलन करता है और एक IC 555 मोनोस्टेबल सर्किट को उचित रूप से कॉन्फ़िगर करके टैकोमीटर सर्किट को सक्रिय करता है।
उपरोक्त टैकोमीटर से आउटपुट टी 1 के आधार पर इनपुट आवृत्ति के जवाब में आनुपातिक रूप से भिन्न होता है।
जैसा कि आवृत्ति चरम दाएं तरफ वोल्टेज बढ़ाती है, डी 3 आउटपुट भी बढ़ जाता है और इसके विपरीत होता है, और अपेक्षाकृत स्थिर स्तर तक वी / हर्ट्ज अनुपात रखने में मदद करता है।
गति पर नियंत्रण कैसे करें
निरंतर V / F का उपयोग करके मोटर की गति को IC 4035 के क्लॉक इनपुट में आवृत्ति इनपुट में परिवर्तन करके प्राप्त किया जा सकता है। इसे IC 555 astable सर्किट या चर मानक सर्किट से घड़ी इनपुट के लिए एक चर आवृत्ति खिलाकर प्राप्त किया जा सकता है आईसी 4035।
आवृत्ति को बदलने से प्रभावी रूप से मोटर की परिचालन आवृत्ति में परिवर्तन होता है जो कि पर्ची की गति को कम करता है।
टैकोमीटर द्वारा इसका पता लगाया जाता है, और टैकोमीटर आनुपातिक रूप से IC2 के पिन # 5 पर क्षमता को कम कर देता है, जो बदले में मोटर पर SPWM सामग्री को कम करता है, और फलस्वरूप मोटर के लिए वोल्टेज कम हो जाता है, जिससे मोटर की गति भिन्नता सुनिश्चित करती है आवश्यक वी / एफ अनुपात।
ए होममेड वी टू एफ कन्वर्टर

आवृत्ति वोल्टेज सर्किट के लिए उपरोक्त वोल्टेज में एक आईसी 4060 का उपयोग किया जाता है और इसका आवृत्ति पर निर्भर प्रतिरोध, इच्छित रूपांतरण के लिए एक एलईडी / एलडीआर विधानसभा के माध्यम से प्रभावित होता है।
LED / LDR असेंबली को एक लाइट प्रूफ बॉक्स के अंदर सील कर दिया जाता है, और LDR IC के 1M फ्रीक्वेंसी डिपेंडेंट रेसिस्टेंट के पार स्थित होता है।
चूंकि LDR / LDR प्रतिक्रिया काफी रैखिक है, LDR पर एलईडी की अलग-अलग रोशनी आईसी के पिन 3 में एक समान रूप से भिन्न (बढ़ती या घटती) आवृत्ति उत्पन्न करती है।
मंच के FSD या V / Hz रेंज को उचित रूप से 1M रोकनेवाला या यहाँ तक कि C1 मान सेट करके सेट किया जा सकता है।
एलईडी वोल्टेज व्युत्पन्न है और पहले PWM सर्किट चरण से PWM के माध्यम से प्रकाशित किया गया है। तात्पर्य यह है कि पीडब्लूएम अलग-अलग होने के कारण, एलईडी रोशनी भी भिन्न होगी जो बदले में उपरोक्त आरेख में आईसी 4060 के पिन 3 पर आनुपातिक रूप से बढ़ती या घटती आवृत्ति को जन्म देगी।
VFD के साथ कनवर्टर को एकीकृत करना
आईसी 4060 से इस बदलती आवृत्ति को अब केवल 3 चरण जनरेटर आईसी सीडी 4035 घड़ी इनपुट के साथ एकीकृत करने की आवश्यकता है।
उपरोक्त चरण 3 चरण VFD सर्किट बनाने के लिए मुख्य सामग्री बनाते हैं।
अब, आईजीबीटी मोटर नियंत्रकों की आपूर्ति के लिए आवश्यक डीसी बस और संपूर्ण डिजाइन के लिए प्रक्रियाओं की स्थापना के बारे में चर्चा करना महत्वपूर्ण होगा।
आईजीबीटी एच-ब्रिज रेल पर लागू डीसी बस निम्नलिखित सर्किट कॉन्फ़िगरेशन का उपयोग करके उपलब्ध 3 चरण मेन इनपुट को सुधार कर प्राप्त किया जा सकता है। आईजीबीटी डीसी बस रेल को 'लोड' के रूप में संकेतित बिंदुओं से जोड़ा जाता है।

एकल चरण स्रोत के लिए मानक 4 डायोड ब्रिज नेटवर्क कॉन्फ़िगरेशन का उपयोग करके सुधार को लागू किया जा सकता है।
प्रस्तावित 3 चरण VFD सर्किट को कैसे सेट करें
यह निम्नलिखित निर्देशों के अनुसार किया जा सकता है:
IGBTs (मोटर जुड़े बिना) भर में डीसी बस वोल्टेज लागू करने के बाद, PWM 1k पूर्व निर्धारित समायोजित करें जब तक कि रेल भर में वोल्टेज इच्छित मोटर वोल्टेज चश्मा के बराबर न हो जाए।
दिए गए मोटर विनिर्देशों के अनुसार आवश्यक सही आवृत्ति स्तर पर किसी भी आईसी IRS2330 इनपुट को समायोजित करने के लिए IC 4060 1M पूर्व निर्धारित को समायोजित करें।
उपरोक्त प्रक्रियाओं के पूरा होने के बाद, निर्दिष्ट मोटर को विभिन्न वोल्टेज स्तरों, वी / हर्ट्ज पैरामीटर के साथ जोड़ा और आपूर्ति किया जा सकता है और कनेक्टेड मोटर पर एक स्वचालित वी / हर्ट्ज संचालन के लिए पुष्टि की जा सकती है।
पिछला: ग्रो लाइट सर्किट कैसे बनाएं अगला: पानी सॉफ़्नर सर्किट समझाया