इस लेख में हम यह समझने की कोशिश करेंगे कि अपेक्षाकृत सीधी गणना के साथ इंडक्शन मोटर की गति को नियंत्रित करने के लिए स्केलर कंट्रोल एल्गोरिदम कैसे लागू किया जाता है, और फिर भी मोटर का एक यथोचित अच्छा रैखिक गति नियंत्रण प्राप्त करता है।

कई शीर्ष बाजार विश्लेषण से रिपोर्ट से पता चलता है कि प्रेरण मोटर्स यह सबसे लोकप्रिय है जब यह भारी औद्योगिक मोटर से संबंधित अनुप्रयोगों और नौकरियों को संभालने के लिए आता है। इंडक्शन मोटर्स की लोकप्रियता के पीछे मुख्य कारण मूल रूप से इसकी उच्च डिग्री की मजबूती, पहनने और आंसू के मुद्दों के मामले में अधिक विश्वसनीयता और तुलनात्मक रूप से उच्च कार्यात्मक दक्षता है।
उन्होंने कहा, इंडक्शन मोटर्स में एक विशिष्ट नकारात्मक पहलू होता है, क्योंकि ये साधारण पारंपरिक तरीकों से नियंत्रित करने में आसान नहीं होते हैं। प्रेरण मोटर्स को नियंत्रित करना अपेक्षाकृत जटिल गणितीय विन्यास के कारण अपेक्षाकृत अधिक मांग है, जिसमें मुख्य रूप से शामिल हैं:
- कोर संतृप्ति पर गैर-रैखिक प्रतिक्रिया
- वाइंडिंग के अलग-अलग तापमान के कारण प्रपत्र दोलनों में अस्थिरता।
प्रेरण मोटर नियंत्रण को लागू करने वाले इन महत्वपूर्ण पहलुओं के कारण, उच्च विश्वसनीयता के साथ पूरी तरह से गणना किए गए एल्गोरिथ्म की मांग करता है, उदाहरण के लिए 'वेक्टर नियंत्रण' विधि का उपयोग करके, और इसके अलावा एक माइक्रोकंट्रोलर आधारित प्रसंस्करण प्रणाली का उपयोग करना।
स्केलर नियंत्रण कार्यान्वयन को समझना
हालाँकि एक और तरीका मौजूद है जिसे बहुत आसान कॉन्फ़िगरेशन का उपयोग करके इंडक्शन मोटर कंट्रोल को लागू करने के लिए लागू किया जा सकता है, यह है नॉन-वेक्टर ड्राइव तकनीकों को शामिल करने वाला स्केलर कंट्रोल।
एक सीधी वोल्टेज प्रतिक्रिया और वर्तमान नियंत्रित प्रणालियों के साथ इसे संचालित करके एसी प्रेरण मोटर को स्थिर स्थिति में सक्षम करना वास्तव में संभव है।
इस स्केलर विधि में, स्केलर वैरिएबल को एक बार घुमाया जा सकता है, क्योंकि इसका सही मूल्य या तो व्यावहारिक रूप से प्रयोग करके या उपयुक्त सूत्रों और गणनाओं के माध्यम से प्राप्त किया जाता है।
अगला, इस माप का उपयोग एक खुले लूप सर्किट के माध्यम से या बंद फीडबैक लूप टोपोलॉजी के माध्यम से मोटर नियंत्रण को लागू करने के लिए किया जा सकता है।
भले ही नियंत्रण की स्केलर विधि मोटर पर यथोचित स्थिर-स्थिर परिणाम का वादा करती है, लेकिन इसकी क्षणिक प्रतिक्रिया निशान तक नहीं हो सकती है।
इंडक्शन मोटर्स कैसे काम करती है
इंडक्शन मोटर्स में 'इंडक्शन' शब्द इसके संचालन के अनूठे तरीके को संदर्भित करता है जिसमें स्टेटर वाइंडिंग द्वारा रोटर को चुम्बकित करना ऑपरेशन का एक महत्वपूर्ण पहलू बन जाता है।
जब एसी को स्टेटर वाइंडिंग में लगाया जाता है, तो स्टेटर वाइंडिंग से चुंबकीय क्षेत्र को दोलन करता है, रोटर आर्मेचर के साथ रोटर पर एक नया चुंबकीय क्षेत्र बनाता है, जो बदले में स्टेटर चुंबकीय क्षेत्र के साथ प्रतिक्रिया करता है जो रोटर पर अधिक मात्रा में घूर्णी टोक़ को प्रेरित करता है। । यह घूर्णी टोक़ मशीन को आवश्यक प्रभावी यांत्रिक आउटपुट प्रदान करता है।
3-चरण गिलहरी केज इंडक्शन मोटर क्या है
यह प्रेरण मोटर्स का सबसे लोकप्रिय संस्करण है और बड़े पैमाने पर औद्योगिक अनुप्रयोगों में उपयोग किया जाता है। एक गिलहरी पिंजरे प्रेरण मोटर में, रोटर कंडक्टर की तरह बार की एक श्रृंखला को वहन करता है रोटर के अक्ष के आसपास संरचना की तरह एक अद्वितीय पिंजरे पेश करता है और इसलिए नाम 'गिलहरी पिंजरे'।
ये पट्टियाँ जो आकार में तिरछी होती हैं और रोटर अक्ष के चारों ओर चलती हैं, सलाखों के सिरों पर मोटी और मजबूत धातु के छल्ले से जुड़ी होती हैं। ये धातु के छल्ले न केवल बार को दृढ़ता से सुरक्षित करने में मदद करते हैं, बल्कि सलाखों के पार एक आवश्यक विद्युत शॉर्ट सर्किटिंग को भी लागू करते हैं।
जब स्टेटर वाइंडिंग को 3-चरण साइनसोइडल प्रत्यावर्ती धारा के साथ लागू किया जाता है, तो परिणामस्वरूप चुंबकीय क्षेत्र भी 3 चरण स्टेटर साइन आवृत्ति ()) के समान गति के साथ बढ़ना शुरू कर देता है।
चूंकि गिलहरी पिंजरे रोटर विधानसभा को स्टेटर वाइंडिंग के भीतर आयोजित किया जाता है, इसलिए स्टेटर वाइंडिंग से उपरोक्त 3 चरण चुंबकीय क्षेत्र रोटर विधानसभा के साथ प्रतिक्रिया करता है जो पिंजरे विधानसभा के बार कंडक्टर पर एक बराबर चुंबकीय क्षेत्र को प्रेरित करता है।
यह रोटर सलाखों के चारों ओर निर्माण करने के लिए एक माध्यमिक चुंबकीय क्षेत्र को मजबूर करता है, और परिणामस्वरूप इस नए चुंबकीय क्षेत्र को स्टेटर क्षेत्र के साथ बातचीत करने के लिए मजबूर किया जाता है, रोटर पर एक घूर्णी टोक़ को लागू करता है जो स्टेटर चुंबकीय क्षेत्र की दिशा का पालन करने की कोशिश करता है।

इस प्रक्रिया में रोटर की गति स्टेटर की आवृत्ति गति को प्राप्त करने की कोशिश करती है, और जैसे ही यह स्टेटर सिंक्रोनस चुंबकीय क्षेत्र की गति के करीब पहुंचता है, स्टेटर आवृत्ति की गति और रोटर की घूर्णी गति के बीच सापेक्ष गति का अंतर कम होने लगता है, जो चुंबकीय में कमी का कारण बनता है। स्टेटर के चुंबकीय क्षेत्र पर रोटर के चुंबकीय क्षेत्र की बातचीत, अंततः रोटर पर टोक़ को कम करना, और रोटर के बराबर बिजली उत्पादन।
यह रोटर पर एक न्यूनतम शक्ति की ओर जाता है और इस गति से रोटर को एक स्थिर-स्थिति का अधिग्रहण करने के लिए कहा जाता है, जहां रोटर पर लोड बराबर होता है और रोटर पर टोक़ का मिलान होता है।
लोड के जवाब में इंडक्शन मोटर के काम को संक्षेप में बताया जा सकता है:
चूंकि रोटर (शाफ्ट) की गति और आंतरिक स्टेटर आवृत्ति की गति के बीच एक ठीक अंतर बनाए रखना अनिवार्य हो जाता है, रोटर की गति जो वास्तव में लोड को संभालती है, स्टेटर आवृत्ति की गति की तुलना में थोड़ी कम गति से घूमती है। इसके विपरीत, अगर हमें लगता है कि स्टेटर को 50 हर्ट्ज 3 चरण की आपूर्ति के साथ लागू किया जाता है, तो स्टेटर वाइंडिंग में इस 50 हर्ट्ज आवृत्ति की कोणीय गति रोटर की घूर्णी गति में प्रतिक्रिया की तुलना में हमेशा थोड़ी अधिक होगी, यह एक इष्टतम सुनिश्चित करने के लिए स्वाभाविक रूप से बनाए रखा गया है रोटर पर बिजली।
इंडक्शन मोटर में स्लिप क्या है
स्टेटर की आवृत्ति की कोणीय गति और रोटर की उत्तरदायी घूर्णी गति के बीच के अंतर को 'स्लिप' कहा जाता है। स्लिप को उन स्थितियों में भी पेश करने की आवश्यकता है जहां मोटर एक क्षेत्र-उन्मुख रणनीति के साथ संचालित होता है।
चूंकि प्रेरण मोटर्स में रोटर शाफ्ट इसके रोटेशन के लिए किसी भी बाहरी उत्तेजना पर निर्भर नहीं करता है, यह पारंपरिक पर्ची के छल्ले या ब्रश के बिना काम कर सकता है जो लगभग शून्य पहनने और आंसू, उच्च दक्षता और इसके रखरखाव के साथ अभी तक सस्ती सुनिश्चित करता है।
इन मोटर्स में टोक़ कारक स्टेटर और रोटर के चुंबकीय प्रवाह के बीच स्थापित कोण द्वारा निर्धारित किया जाता है।
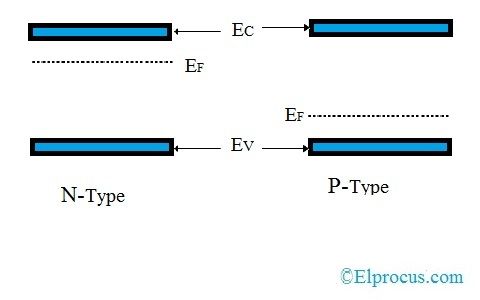
नीचे दिए गए आरेख को देखते हुए, हम देख सकते हैं कि रोटर की गति को and के रूप में सौंपा गया है, और स्टेटर और रोटर पर आवृत्तियों को पैरामीटर 's' या पर्ची द्वारा निर्धारित किया जाता है, जो सूत्र के साथ प्रस्तुत किया गया है:
s = ( ω रों - ω आर ) / ω रों
उपरोक्त अभिव्यक्ति में, एस 'स्लिप' है जो स्टेटर की सिंक्रोनस आवृत्ति गति और रोटर शाफ्ट पर विकसित वास्तविक मोटर गति के बीच अंतर को प्रदर्शित करता है।

स्केलर स्पीड कंट्रोल थ्योरी को समझना
प्रेरण मोटर नियंत्रण अवधारणाओं में जहां तकनीकी वी / हर्ट्ज नियोजित किया गया है, गति नियंत्रण को आवृत्ति के संबंध में स्टेटर वोल्टेज को समायोजित करके कार्यान्वित किया जाता है, जैसे कि एयर गैप फ्लक्स स्थिर-राज्य की अपेक्षित सीमा से अधिक विचलन करने में सक्षम नहीं है, दूसरे शब्दों में यह इस स्थिर स्थिर स्थिति के भीतर बनाए रखा जाता है मूल्य, और इसलिए यह भी कहा जाता है अदिश नियंत्रण विधि चूंकि तकनीक बहुत तेजी से मोटर की गति को नियंत्रित करने के लिए स्थिर-स्थिति की गतिशीलता पर निर्भर करती है।
हम इस अवधारणा के काम को निम्न आकृति का उल्लेख करके समझ सकते हैं, जो एक स्केलर नियंत्रण तकनीक की सरलीकृत योजना को दर्शाता है। सेट अप में यह माना जाता है कि स्टेटर प्रतिरोध (रु) शून्य है, जबकि स्टेटर रिसाव इंडक्शन (LI) रोटर रिसाव और मैग्नेटाइजिंग इंडक्शन (LIr) पर प्रभावित हुआ। (LIr) जो वास्तव में वायु अंतर प्रवाह की भयावहता को दर्शाता है, को कुल रिसाव अधिष्ठापन (Ll = Lls + Llr) से पहले धकेल दिया गया है।

इसके कारण, मैग्नेटाइजिंग करंट द्वारा बनाया गया एयर गैप प्रवाह स्टेटर की आवृत्ति अनुपात के करीब अनुमानित मान प्राप्त करता है। इस प्रकार एक स्थिर-राज्य मूल्यांकन के लिए चरण अभिव्यक्ति को निम्नानुसार लिखा जा सकता है:

प्रेरण मोटर्स के लिए जो उनके रैखिक चुंबकीय क्षेत्रों में चल रही हो सकती हैं, Lm नहीं बदलेगी और स्थिर रहेगी, ऐसे मामलों में उपरोक्त समीकरण निम्नानुसार व्यक्त किए जा सकते हैं:

जहां V और ator क्रमशः स्टेटर वोल्टेज मान और स्टेटर फ्लक्स हैं, जबकि the डिजाइन में चरण पैरामीटर का प्रतिनिधित्व करता है।
ऊपर दी गई अंतिम अभिव्यक्ति स्पष्ट रूप से बताती है कि जब तक V / f अनुपात को इनपुट फ़्रीक्वेंसी (f) में किसी भी बदलाव की परवाह किए बिना स्थिर रखा जाता है, तब तक फ़्लक्स भी स्थिर रहता है, जो आपूर्ति वोल्टेज आवृत्ति के आधार पर टॉक को संचालित करने में सक्षम बनाता है। । इसका मतलब है कि अगर implM निरंतर स्तर पर बनाए रखा जाता है, तो Vs / also अनुपात भी एक निरंतर प्रासंगिक गति से प्रदान किया जाएगा। इसलिए जब भी मोटर की गति बढ़ाई जाती है, तो स्टेटर वाइंडिंग के पार वोल्टेज को भी आनुपातिक रूप से बढ़ाना होगा, ताकि एक स्थिर Vs / f बनाए रखा जा सके।
हालाँकि यहाँ पर्ची मोटर से जुड़ी भार की क्रिया है, तुल्यकालिक आवृत्ति गति मोटर की वास्तविक गति को नहीं दर्शाती है।
रोटर पर लोड टोक़ की अनुपस्थिति में, परिणामी पर्ची लापरवाही से छोटी हो सकती है, जिससे मोटर को तुल्यकालिक गति के करीब प्राप्त करने की अनुमति मिलती है।
यही कारण है कि एक बुनियादी Vs / f या v / Hz कॉन्फ़िगरेशन में आमतौर पर एक प्रेरण मोटर के सटीक गति नियंत्रण को लागू करने की क्षमता नहीं हो सकती है जब मोटर एक लोड टोक़ के साथ जुड़ा होता है। हालाँकि स्पीड माप के साथ सिस्टम में एक स्लिप मुआवजा काफी आसानी से पेश किया जा सकता है।
नीचे संकेतित चित्रमय प्रतिनिधित्व स्पष्ट रूप से एक बंद लूप V / Hz प्रणाली के भीतर एक गति संवेदक को दर्शाता है।

व्यावहारिक कार्यान्वयन में, आमतौर पर स्टेटर वोल्टेज और आवृत्ति का अनुपात इन मापदंडों की रेटिंग पर निर्भर हो सकता है।
V / Hz स्पीड कंट्रोल का विश्लेषण
निम्नलिखित आंकड़े में एक मानक V / Hz विश्लेषण देखा जा सकता है।

मौलिक रूप से आपको V / Hz प्रोफ़ाइल में 3 गति चयन श्रेणियां मिलेंगी, जिन्हें निम्नलिखित बिंदुओं से समझा जा सकता है:
- सन्दर्भ में आंकड़ा 4 जब कट-ऑफ फ्रिक्वेंसी 0-fc क्षेत्र में होती है, तो एक वोल्टेज इनपुट आवश्यक हो जाता है, जो स्टेटर वाइंडिंग में एक संभावित गिरावट विकसित करता है, और इस वोल्टेज ड्रॉप को नजरअंदाज नहीं किया जा सकता है और आपूर्ति वोल्टेज को बढ़ाकर मुआवजा दिया जाना चाहिए। यह इंगित करता है कि इस क्षेत्र में V / Hz अनुपात प्रोफ़ाइल एक रैखिक कार्य नहीं है। हम उचित स्टेटर वोल्टेज के लिए कट ऑफ फ्रीक्वेंसी fc का विश्लेषण कर सकते हैं, स्थिर स्टेट समतुल्य सर्किट की मदद से रु।
- क्षेत्र एफसी-आर (रेटेड) हर्ट्ज में, यह एक निरंतर बनाम / हर्ट्ज संबंध को निष्पादित करने में सक्षम है, इस मामले में रिश्ते की ढलान संकेत करती है एयर गैप फ्लक्स की मात्रा ।
- F (रेटेड) से परे के क्षेत्र में, उच्चतर आवृत्तियों पर चलने के बाद, निरंतर दर पर Vs / f अनुपात को पूरा करना असंभव हो जाता है, क्योंकि इस स्थिति में स्टेटर वोल्टेज f (रेटेड) मान पर प्रतिबंधित हो जाता है। यह सुनिश्चित करने के लिए होता है कि स्टेटर वाइंडिंग एक इन्सुलेशन टूटने के अधीन नहीं है। इस स्थिति के कारण, जिसके परिणामस्वरूप हवा का अंतर कम हो जाता है, जिससे समझौता हो जाता है और कम हो जाता है, जिसके परिणामस्वरूप रोटर टॉर्क कम हो जाता है। प्रेरण मोटर्स में इस परिचालन चरण को कहा जाता है 'क्षेत्रवार क्षेत्र' । इस तरह की स्थिति को रोकने के लिए, आमतौर पर एक स्थिर वी / हर्ट्ज नियम इन आवृत्ति सीमाओं में पालन नहीं किया जाता है।
स्टेटर घुमावदार में आवृत्ति परिवर्तन के बावजूद एक स्थिर स्टेटर चुंबकीय प्रवाह की उपस्थिति के कारण, रोटर पर टॉक को अब केवल स्लिप गति पर निर्भर रहना पड़ता है, इस प्रभाव को देखा जा सकता है आंकड़ा 5 ऊपर
उचित स्लिप गति विनियमन के साथ, एक निरंतर वी / हर्ट्ज सिद्धांत को नियोजित करके रोटर लोड पर टोक़ के साथ एक प्रेरण मोटर की गति को प्रभावी ढंग से नियंत्रित किया जा सकता है।
इसलिए चाहे वह गति नियंत्रण का एक खुला या बंद-लूप मोड हो, दोनों को निरंतर V / Hz नियम का उपयोग करके लागू किया जा सकता है।
नियंत्रण का एक ओपन लूप मोड उन अनुप्रयोगों में नियोजित किया जा सकता है जहां गति नियंत्रण की सटीकता एक महत्वपूर्ण कारक नहीं हो सकती है, जैसे एचवीएसी इकाइयों में, या पंखे और उपकरणों की तरह धौंकनी। ऐसे मामलों में लोड की आवृत्ति मोटर के आवश्यक गति स्तर का उल्लेख करके पाई जाती है, और रोटर की गति को तात्कालिक तुल्यकालिक गति का अनुसरण करने की उम्मीद है। मोटर के खिसकने से उत्पन्न होने वाली गति में किसी भी प्रकार की विसंगति को आमतौर पर ऐसे अनुप्रयोगों में नजरअंदाज कर दिया जाता है।
संदर्भ: http://www.ti.com/lit/an/sprabq8/sprabq8.pdf
पिछला: चित्र और सूत्रों के साथ पुल-अप और पुल-डाउन प्रतिरोधों को समझना अगला: 18650 2600mAh बैटरी डेटाशीट और वर्किंग