यहां प्रस्तुत लेख एक बहुत ही सरल बंद लूप एसी मोटर गति नियंत्रक सर्किट की व्याख्या करता है जिसका उपयोग एकल चरण एसी मोटर गति को नियंत्रित करने के लिए किया जा सकता है।
सर्किट बहुत सस्ता है और आवश्यक कार्यान्वयन के लिए साधारण इलेक्ट्रॉनिक घटकों का उपयोग करता है। सर्किट की मुख्य विशेषता यह है कि यह एक बंद लूप प्रकार है, इसका मतलब है कि इस सर्किट में लोड की गति या मोटर की टोक़ कभी भी प्रभावित नहीं हो सकती है और इसके विपरीत मोटर की गति टोक़ के अप्रत्यक्ष रूप से आनुपातिक है गति की भयावहता।
सर्किट ऑपरेशन:
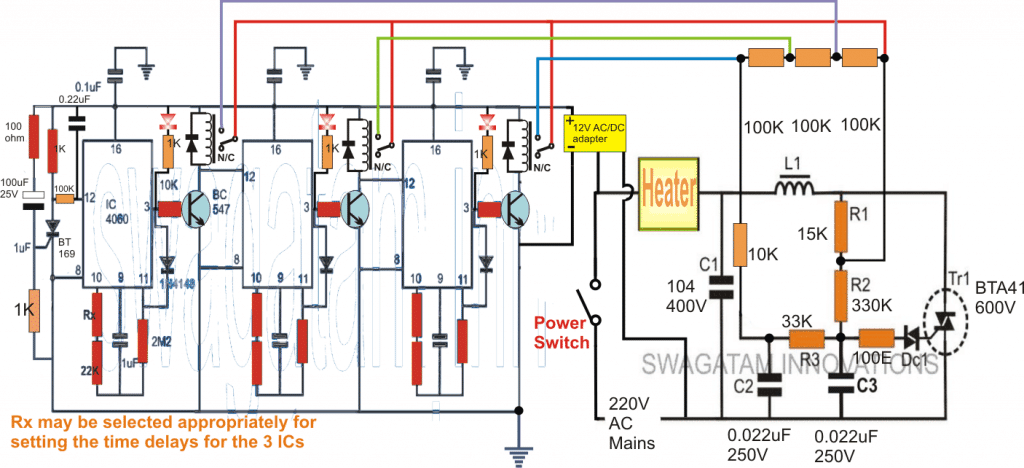
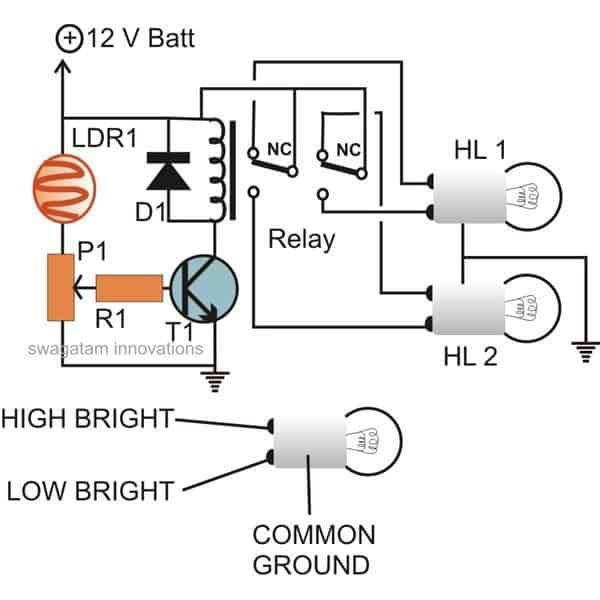
प्रस्तावित सिंगल फेज बंद लूप एसी मोटर कंट्रोलर के सर्किट आरेख का जिक्र करते हुए, निम्नलिखित बिंदुओं के माध्यम से शामिल संचालन को समझा जा सकता है:
इनपुट एसी के सकारात्मक आधे चक्रों के लिए, संधारित्र C2 को रोकनेवाला R1 और डायोड D1 के माध्यम से चार्ज किया जाता है।

C2 की चार्जिंग तब तक बनी रहती है जब तक कि इस संधारित्र में वोल्टेज कॉन्फ़िगरेशन के सिम्युलेटेड जेनर वोल्टेज के बराबर न हो जाए।
ट्रांजिस्टर T1 के चारों ओर तार लगाया गया सर्किट प्रभावी रूप से जेनर डायोड के संचालन का अनुकरण करता है।
पॉट P1 का समावेश इस 'जेनर डायोड' के वोल्टेज को समायोजित करना संभव बनाता है। संक्षेप में, टी 1 के पार विकसित वोल्टेज, सचमुच प्रतिरोधों आर 3 और आर 2 + पी 1 के बीच के अनुपात से निर्धारित होता है।
रोकनेवाला आर 4 में वोल्टेज हमेशा 0.6 वोल्ट के बराबर बनाए रखा जाता है जो टी 1 के बेस एमिटर वोल्टेज के आवश्यक कंडक्टिंग वोल्टेज के बराबर होता है।
इसलिए इसका मतलब है कि ऊपर वर्णित जेनर वोल्टेज उस मूल्य के बराबर होना चाहिए जो अभिव्यक्ति को हल करके प्राप्त किया जा सकता है:
(P1 + R2 + R3 / R3) × 0.6
ऊपर बंद लूप एसी मोटर गति नियंत्रक सर्किट के लिए भागों की सूची
- R1 = 39K,
- R2 = 12K,
- R3 = 22K,
- R4 = 68K,
- P1 = 220K,
- सभी डायोड = 1N4007,
- C1 = 0.1 / 400V,
- C2 = 100uF / 35V,
- T1 = BC547B,
- SCR = C106
- 3 मिमी फेराइट रॉड या 40 uH / 5 वाट पर 25 SWG तार के L1 = 30 मोड़
कैसे लोड एक विशेष कारण के लिए स्थिति है
एक सावधानीपूर्वक जांच से पता चलता है कि मोटर या लोड को सामान्य स्थिति में पेश नहीं किया जाता है, बल्कि यह एससीआर के ठीक बाद, इसके कैथोड पर लगाया जाता है।
यह इस सर्किट के साथ एक दिलचस्प विशेषता को पेश करता है।
सर्किट के भीतर मोटर की उपरोक्त विशेष स्थिति एससीआर के फायरिंग समय को मोटर के पीछे के ईएमएफ और सर्किट के 'जेनर वोल्टेज' के बीच संभावित अंतर पर निर्भर करती है।
इसका सीधा सा मतलब है कि मोटर जितनी अधिक लोड होती है, उतनी ही जल्दी एससीआर में आग लगती है।
यह प्रक्रिया एक बंद लूप प्रकार की कार्यप्रणाली का अनुकरण करती है जहां प्रतिक्रिया मोटर के द्वारा उत्पन्न ईएमएफ के रूप में प्राप्त होती है।
हालांकि सर्किट एक मामूली खामी के साथ जुड़ा हुआ है। एससीआर को अपनाने का मतलब है कि सर्किट केवल 180 डिग्री चरण नियंत्रण को संभाल सकता है और मोटर को पूरी गति सीमा पर नियंत्रित नहीं किया जा सकता है, लेकिन केवल 50% के लिए।
सर्किट की सस्ती प्रकृति के कारण जुड़ा एक और नुकसान यह है कि मोटर कम गति पर हिचकी का उत्पादन करती है, हालांकि गति बढ़ने पर यह मुद्दा पूरी तरह से गायब हो जाता है।
एल 1 और सी 1 का कार्य
L1 और C1 SCR द्वारा रैपिड फेज़ चॉपिंग के कारण उत्पन्न उच्च आवृत्ति RFs की जाँच के लिए शामिल किए गए हैं।
यह कहने के लिए कम आवश्यक है कि इष्टतम परिणामों के लिए डिवाइस (SCR) को एक उपयुक्त हीटसिंक पर लगाया जाए।
वापस EMF ड्रिल स्पीड कंट्रोलर सर्किट
इस सर्किट का उपयोग मुख्य रूप से छोटी श्रृंखला के घाव मोटर्स की स्थिर गति को नियंत्रित करने के लिए किया जाता है, जैसा कि कई इलेक्ट्रिक हैंड ड्रिल आदि में पाया जाता है। टॉर्क और गति को पी 1 पोटेंशियोमीटर द्वारा नियंत्रित किया जाता है। यह पोटेंशियोमीटर कॉन्फ़िगरेशन निर्दिष्ट करता है कि कैसे माइनस ट्राइक को ट्रिगर किया जा सकता है।

जब मोटर की गति पूर्व निर्धारित मूल्य (लोड जुड़ा हुआ) के साथ बस गिरती है, तो मोटर की ईएमएफ कम हो जाती है। नतीजतन, आर 1, पी 1 और सी 5 के माध्यम से चारों ओर वोल्टेज बढ़ जाता है ताकि ट्राइक पहले सक्रिय हो जाए और मोटर की गति बढ़ जाए। गति स्थिरता का एक निश्चित अनुपात इस तरीके से प्राप्त किया जाता है।
पिछला: समुद्र के पानी से बिजली कैसे पैदा करें - 2 सरल तरीके अगला: जीएसएम आधारित सेल फोन रिमोट कंट्रोल स्विच सर्किट






![24 वी से 12 वी डीसी कनवर्टर सर्किट [स्विचिंग रेगुलेटर का उपयोग करके]](https://electronics.jf-parede.pt/img/3-phase-power/F1/24-v-to-12-v-dc-converter-circuit-using-switching-regulator-1.jpg)