एक इलेक्ट्रिक मशीन जो विद्युत ऊर्जा को परिवर्तित करता है यांत्रिक ऊर्जा में एक विद्युत मोटर कहा जाता है। सबसे पहले और सबसे महत्वपूर्ण इलेक्ट्रिक मोटर 1740 के दशक में स्कॉटिश भिक्षु एंड्रयू गॉर्डन द्वारा बनाया गया एक साधारण इलेक्ट्रोस्टैटिक उपकरण है। लेकिन 1821 में, माइकल फैराडे ने विद्युत ऊर्जा को यांत्रिक ऊर्जा में बदलने का प्रदर्शन किया।
इलेक्ट्रिक मोटर्स को मुख्य रूप से दो श्रेणियों में वर्गीकृत किया जाता है: एसी मोटर्स और डीसी मोटर्स । फिर से, प्रत्येक श्रेणी को कई प्रकारों में विभाजित किया जाता है। कई भार जैसे कि मिक्सर, ग्राइंडर, पंखे इत्यादि, अक्सर इस्तेमाल होने वाले घरेलू उपकरण जिनमें हम विभिन्न प्रकार की मोटरें पा सकते हैं और इन्हें अलग-अलग गति से मोटरों के गति नियंत्रण प्रावधान के साथ संचालित किया जा सकता है। इस लेख में, हम डीसी मोटर्स के प्रमुख प्रकारों में से एक के बारे में चर्चा करने जा रहे हैं स्टेपर मोटर और उसका नियंत्रण माइक्रोकंट्रोलर का उपयोग करना।
स्टेपर मोटर
एक तुल्यकालिक और ब्रशलेस डीसी मोटर जो इलेक्ट्रिक दालों को यांत्रिक आंदोलनों में परिवर्तित करता है और इस प्रकार, एक पूर्ण रोटेशन को पूरा करने के लिए प्रत्येक चरण के बीच एक निश्चित कोण के साथ स्टेपवाइज घुमाता है जिसे स्टेपर मोटर कहा जाता है। स्टेपर मोटर के रोटेशन के चरणों के बीच के कोण को मोटर के स्टेपर कोण के रूप में कहा जाता है।

स्टेपर मोटर
स्टेपर मोटर्स को उनकी वाइंडिंग के अनुसार दो प्रकारों में वर्गीकृत किया गया है: यूनिपोलर स्टेपर मोटर्स और बाइपोलर स्टेपर मोटर्स। द्विध्रुवीय स्टेपर मोटर की तुलना में एकध्रुवीय स्टेपर मोटर का उपयोग अक्सर आसानी से किया जाता है। लेकिन विभिन्न प्रकार के स्टेपर मोटर्स हैं जैसे कि स्थायी चुंबक स्टेपर मोटर, परिवर्तनीय अनिच्छा स्टेपर मोटर और हाइब्रिड स्टेपर मोटर।
स्टेपर मोटर नियंत्रण
स्टेपर मोटर को विभिन्न तकनीकों के साथ नियंत्रित किया जा सकता है, लेकिन यहां हम स्टेपर मोटर नियंत्रण का उपयोग कर चर्चा कर रहे हैं एटमेगा माइक्रोकंट्रोलर । 89C51 का एक माइक्रोकंट्रोलर है 8051 माइक्रोकंट्रोलर परिवार ।

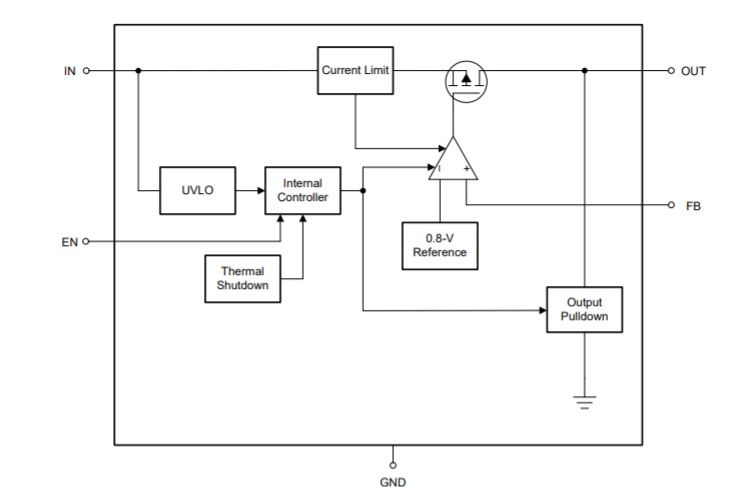
स्टेपर मोटर नियंत्रण के ब्लॉक आरेख
8051 माइक्रोकंट्रोलर का उपयोग कर एक स्टेपर मोटर नियंत्रण के ब्लॉक आरेख के साथ आंकड़ा में दिखाया गया है बिजली की आपूर्ति , माइक्रोकंट्रोलर, स्टेपर मोटर और नियंत्रण स्विच ब्लॉक।
Stepper मोटर नियंत्रण सर्किट डिजाइन करने के लिए 2 तरीके
स्टेपर मोटर कंट्रोलर डिज़ाइन किया गया है 8051 माइक्रोकंट्रोलर का उपयोग करना और स्टेपर मोटर की गति को नियंत्रित करने के लिए स्विचिंग सर्किट। नियंत्रण स्विच सर्किट का उपयोग करके डिजाइन किया जा सकता है ट्रांजिस्टर स्विच या ट्रांजिस्टर के स्थान पर स्टेपर मोटर कंट्रोलर आईसी जैसे ULN2003 का उपयोग करके।
1. स्टेपर मोटर कंट्रोलर आईसी के उपयोग से कंट्रोल सर्किट
एकध्रुवीय स्टेपर मोटर को एक क्रम में स्टेटर कॉइल को सक्रिय करके घुमाया जा सकता है। मोटर कॉइल या लीड पर लगाए गए इन वोल्टेज सिग्नलों का अनुक्रम मोटर को चलाने के लिए पर्याप्त है और इसलिए, स्टेटर कॉइल में करंट की दिशा को नियंत्रित करने के लिए किसी भी चालक सर्किट की आवश्यकता नहीं होती है।

आईसी का उपयोग करते हुए स्टेपर मोटर नियंत्रण
दो-चरण-स्टेपर मोटर में कॉइल से जुड़े चार अंत तार होते हैं और दो छोर से जुड़े दो सामान्य तारों से दो चरण बनते हैं। दो चरणों के सामान्य बिंदु और अंतिम बिंदु क्रमशः जमीन या Vcc और माइक्रोकंट्रोलर पिन से जुड़े होते हैं। मोटर को घुमाने के लिए, दो चरणों के समापन बिंदु को सक्रिय किया जाना है। मुख्य रूप से एक वोल्टेज को चरण 1 के पहले छोर पर लागू किया जाता है, और आगे के वोल्टेज को चरण 2 के पहले छोर पर लागू किया जाता है, और इसी तरह।
स्टेपर मोटर को विभिन्न मोड्स जैसे वेव ड्राइव स्टेपिंग मोड, फुल ड्राइव स्टेपिंग मोड और हाफ ड्राइव स्टेपिंग मोड में संचालित किया जा सकता है।
वेव ड्राइव स्टेपिंग मोड
उपरोक्त अनुक्रम को दोहराकर, मोटर को तरंग-ड्राइव-स्टेपिंग मोड में या तो एक दक्षिणावर्त या एंटीक्लॉकवाइज दिशा में अंतिम बिंदुओं के चयन के आधार पर घुमाया जा सकता है। नीचे दी गई तालिका वेव-ड्राइव-स्टेपिंग मोड के लिए सिग्नल चरण अनुक्रम दिखाती है।


वेव ड्राइव स्टेपिंग मोड
फुल ड्राइव स्टेपिंग मोड
विभिन्न चरणों के दो समापन बिंदुओं को एक साथ सक्रिय करने से एक पूर्ण-ड्राइव-स्टेपिंग मोड प्राप्त होता है। तालिका पूर्ण-ड्राइव-मोड के लिए सिग्नल चरण अनुक्रम दिखाती है।


फुल ड्राइव स्टेपिंग मोड
हाफ ड्राइव स्टेपिंग मोड
लहर और पूर्ण-ड्राइव-स्टेपिंग मोड के चरणों का संयोजन एक आधा-ड्राइव-स्टेपिंग मोड प्राप्त करता है। इस प्रकार, इस मोड में, कदम कोण आधे में विभाजित है। तालिका एक आधा-ड्राइव-स्टेपिंग मोड के सिग्नल चरण अनुक्रम को दिखाती है।


हाफ ड्राइव स्टेपिंग मोड
सामान्य तौर पर, स्टेपिंग कोण स्टेपर मोटर के संकल्प पर निर्भर करता है। थैस्टेप्स का आकार और घुमाव की दिशा इनपुट अनुक्रम की संख्या और क्रम के सीधे आनुपातिक हैं। शाफ्ट की घूर्णन गति इनपुट अनुक्रम की आवृत्ति पर निर्भर करती है। एक समय पर चुम्बक और चुम्बक की संख्या आनुपातिक होती है।
स्टेपर मोटर को 60mA वर्तमान की आवश्यकता होती है, लेकिन एटमेगा माइक्रोकंट्रोलर AT89C51 की अधिकतम वर्तमान रेटिंग 50mA है। तो, एक स्टेपर-मोटर-नियंत्रक ने सिग्नल को स्थानांतरित करने के लिए माइक्रोकंट्रोलर के साथ स्टेपर मोटर को इंटरफ़ेस करने के लिए ICisused है।
2. ट्रांजिस्टर का उपयोग करके स्विच सर्किट को नियंत्रित करें
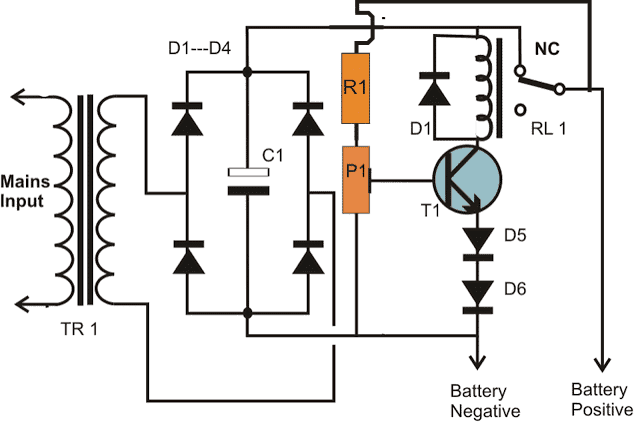
सर्किट को बिजली की आपूर्ति चरण-नीचे ट्रांसफार्मर का उपयोग करके वोल्टेज को 230V से 7.5V तक नीचे ले जाकर दिया जा सकता है, और फिर डायोड के साथ एक पुल रेक्टिफायर द्वारा सुधार । यह सुधारित आउटपुट एक फिल्टर संधारित्र को खिलाया जाता है, और फिर वोल्टेज नियामक के माध्यम से पारित किया जाता है। 5V विनियमित आउटपुट वोल्टेज नियामक से प्राप्त किया जाता है। रीसेट पिन 9 संधारित्र और रोकनेवाला के बीच जुड़ा हुआ है।

ट्रांजिस्टर का उपयोग करते हुए स्टेपर मोटर कंट्रोल सर्किट
सामान्य तौर पर, स्टेपर मोटर में चार कॉइल होते हैं जैसा कि चित्र में दिखाया गया है। तो, मोटर को चलाने के लिए, चार मोटर-चालक सर्किट की आवश्यकता होती है। मोटर चलाने के लिए स्टेपर मोटर कंट्रोलर आईसी का उपयोग करने के बजाय, चार ट्रांजिस्टर क्रमशः 21, 22, 23 और 24 पिन के माइक्रोकंट्रोलर पर चालक सर्किट के रूप में जुड़े हुए हैं।
यदि ट्रांजिस्टर चालन शुरू करते हैं, तो मोटर के घुमाव के कारण कॉइल के चारों ओर एक चुंबकीय क्षेत्र बनाया जाएगा। स्टेपर मोटर की गति इनपुट पल्स फ्रीक्वेंसी के सीधे आनुपातिक है। एक क्रिस्टल थरथरानवाला पिन 11.189 मेगाहर्ट्ज की माइक्रोकंट्रोलर घड़ी आवृत्ति प्रदान करने के लिए 18 और 19 से जुड़ा हुआ है।
किसी भी निर्देश के निष्पादन समय की गणना नीचे दिए गए सूत्र का उपयोग करके की जा सकती है
समय = ((सी * 12)) / एफ
जहाँ C = चक्र की संख्या
और एफ = क्रिस्टल आवृत्ति
अनुप्रयोग आधारित सर्किट में से एक जो सौर पैनल को घुमाने के लिए एक स्टेपर मोटर का उपयोग करता है, नीचे वर्णित है।
स्टेपर मोटर कंट्रोल प्रोग्राम्ड 8051 माइक्रोकंट्रोलर का उपयोग
सन ट्रैकिंग सोलर पैनल प्रोजेक्ट स्वचालित रूप से सौर पैनल को समायोजित करके ऊर्जा की अधिकतम मात्रा उत्पन्न करने का इरादा है। इस परियोजना में, 8051 परिवार के एक प्रोग्राम्ड माइक्रोकंट्रोलर द्वारा नियंत्रित एक स्टेपर मोटर सूर्य के लिए लंबवत सौर पैनलों के चेहरे को हमेशा बनाए रखने के लिए सौर पैनल से जुड़ा होता है।

Stepper Motor Control Edgefxkits.com द्वारा माइक्रोकंट्रोलर का उपयोग करना
प्रोग्रामेड माइक्रोकंट्रोलर सौर पैनल को घुमाने के लिए स्टेपर मोटर को नियमित अंतराल पर विद्युत दालों को उत्पन्न करता है। चालक आईसी का उपयोग स्टेपर मोटर को चलाने के लिए किया जाता है क्योंकि नियंत्रक मोटर की विद्युत आवश्यकताओं को प्रदान करने में असमर्थ है।
कृपया नीचे दिए गए टिप्पणी अनुभाग में टिप्पणी पोस्ट करके अपने सुझाव, प्रतिक्रिया और प्रश्नों को छोड़ दें। हम इस लेख के संबंध में तकनीकी रूप से आपकी मदद करने की पूरी कोशिश करेंगे और इलेक्ट्रिकल और इलेक्ट्रॉनिक्स प्रोजेक्ट विकसित करना स्टेपर मोटर का उपयोग करना।