इस पोस्ट में हम जांच करते हैं कि बीएलडीसी मोटर क्या है और बाद में हम एक सेंसरलेस बीएलडीसी मोटर ड्राइवर सर्किट के डिजाइन के बारे में सीखते हैं।
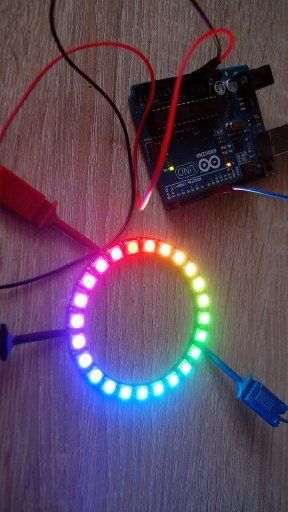
बीएलडीसी सीपीयू प्रशंसक
सीपीयू, वोल्टेज स्टेबलाइजर्स, डीवीडी प्लेयर और अन्य समान उपकरणों में उन तेज़ गति वाले प्रशंसकों को देखा, जो अत्यंत दक्षता के साथ काम करते हैं, न्यूनतम स्थान का उपभोग करते हैं, वर्तमान और अभी तक विशेष उपकरणों के लिए निर्धारित संचालन के रूप में महत्वपूर्ण संचालन देने में सक्षम हैं?
हां, ये बीएलडीसी प्रशंसकों या ब्रशलेस डीसी मोटर्स के सभी आधुनिक संस्करण हैं जो पुराने पारंपरिक ब्रश मोटर्स की तुलना में बहुत बेहतर हैं।

चित्र सौजन्य: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
हालांकि एक BLDC मोटर को एक परिष्कृत ड्राइवर सर्किट की आवश्यकता होगी, और हाँ इन सभी सीपीयू प्रशंसकों में इन ड्राइवर मॉड्यूल शामिल हैं, हालांकि ये एक साधारण डीसी का उपयोग करके आसानी से संचालित होते हैं, आंतरिक रूप से सिस्टम पहले से ही एक स्मार्ट सर्किट से सुसज्जित है।
बीएलडीसी मोटर चालक
यहां हम ऐसे ही एक स्मार्ट BLDC मोटर ड्राइवर सर्किट के बारे में जानेंगे, जो अविश्वसनीय दक्षता के साथ किसी भी छोटे BLDC मोटर को चलाने के लिए सिंगल चिप DRV10963 का उपयोग कर सकता है, और बाद में आने वाले एक लेख में हम देखेंगे कि कैसे इस IC सर्किट को ड्राइविंग के लिए भी अपग्रेड किया जा सकता है। शक्तिशाली उच्च वर्तमान BLDCs जैसे कि जो हैं क्वाडकोप्टर में उपयोग किया जाता है।
लेकिन इससे पहले बीएलडीसी मोटर्स के बारे में थोड़ा सीखना दिलचस्प होगा।
ब्रश और ब्रशलेस डीसी मोटर्स के बीच अंतर
एक ब्रश मोटर और एक ब्रशलेस मोटर और दक्षता दर के बीच का अंतर स्पष्ट है।
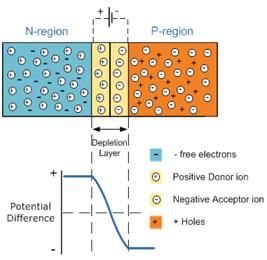
चूंकि ब्रश की गई मोटरों में मैग्नेट के बीच घूमने वाला घाव आर्मेचर होता है, इसलिए उन्हें 'ब्रश' (रगड़ते हुए संपर्क) को लगाना पड़ता है, ताकि चलती कॉइल टर्मिनलों को आपूर्ति स्रोत तक पहुंचने के बिना लगातार आपूर्ति वोल्टेज प्राप्त हो सके, जो अन्यथा तार बना देगा असंभव काम करना और संचालन को खतरे में डालना।
एक ब्रशलेस मोटर में, कॉइल या वाइंडिंग कभी चलती नहीं है और स्थिर रहती है, यहां रोटर स्थायी मैग्नेट का एक सेट ले जाता है और आसपास के घुमावदार चुंबकीय प्रवाह के प्रभाव में घूमता है।
चूंकि चुंबक सभी बाधाओं से मुक्त है, और शक्ति को प्रबंधित करने या प्राप्त करने के लिए टर्मिनलों को शामिल किए बिना काम करने में सक्षम है, इसलिए यह सहजता से, तीव्र गति से घूमने और लगभग एक नीरव स्तर पर घूम सकता है।
लेकिन यहां एक पकड़ है। एक स्थायी चुंबक के फ्लक्स के लिए एक विद्युत चुम्बकीय प्रतिक्रिया करने के लिए, चुंबकीय चरण या ध्रुवों की एक निरंतर बदलाव की आवश्यकता होती है, ताकि दो समकक्षों को लगातार प्रतिक्रिया करने और एक विरोधी बल से गुजरने में सक्षम हो, जिससे आवश्यक टॉर्सनल बल को लगातार जारी किया जा सके। रोटर और परिणामी टोक़ के साथ रोटेशन को निष्पादित करें।
एक ब्रश मोटर में, आर्मेचर कॉइल के स्व-समायोजन प्रकृति के कारण यह आसान हो जाता है जो चुंबकीय बल का विरोध करने वाले एक स्व-घूर्णन और घूर्णन करने में सक्षम होता है और किसी भी बाहरी दालों या प्रसंस्करण की आवश्यकता के बिना घूमता रहता है।
हालांकि बीएलडीसी में यह एक समस्या बन जाती है क्योंकि चुंबक रोटर 'क्लूलेस' बना रहता है और इसे सार्थक तरीके से घुमाने के लिए घुमावदार से गणनात्मक चुंबकीय कमांड की आवश्यकता होती है न कि बेतरतीब तरीके से।
यही कारण है कि मोटर के अंदर घुमावदार के तीन अलग-अलग सेटों को कमांड करने के लिए सभी बीएलडीसी मोटर्स को अनिवार्य रूप से मोटर चालक सर्किट की आवश्यकता होती है।
इस प्रकार सभी BLDC अनिवार्य रूप से 3-चरण मोटर्स हैं और रोटर पर घूर्णी टोक़ के उत्पादन के लिए अनिवार्य रूप से 3 चरणों की आवश्यकता होती है।
सेंसरलेस BLDC ड्राइवर क्या करता है
सेंसर कम बीएलडीसी ड्राइवर सर्किट बस क्रमिक तरीके से घुमावदार के 3 सेटों का विद्युतीकरण करता है जैसे कि चुंबकीय रोटर एक निरंतर विरोधी बल से गुजरने में सक्षम होता है जिससे मोटर एक निरंतर टोक़ और घूर्णी बल को पूरा करने में सक्षम होता है।
लेकिन सर्किट द्वारा बीएलडीसी वाइंडिंग की इस अनुक्रमिक शक्ति को केवल बेतरतीब ढंग से सेट नहीं किया जा सकता है, इसे अग्रानुक्रम में या रोटर चुंबक की घूर्णी स्थिति के जवाब में होना चाहिए, अन्यथा कार्यान्वयन हाइरवायर जा सकता है और हम मोटर शाफ्ट (रोटर) को देख सकते हैं ) चक्करदार घुमक्कड़ी, जो कि घड़ी की सूई और एक एंटीक्लॉकवाइज के बीच मरोड़ रही है जिसमें कोई समझदार घुमाव नहीं है।
क्यों BLDC मोटर्स में सेंसर का उपयोग किया जाता है
इसलिए, हम कई BLDC मोटर वेरिएंट्स के अंदर तैनात सेंसर पेश करते हैं, ये सेंसर (आमतौर पर हॉल इफेक्ट सेंसर) रोटर चुंबक के चुंबकीय ध्रुवों की बदलती स्थिति को समझते हैं, संबंधित प्रोसेसर सर्किट को संबंधित वाइंडिंग को विद्युतीकृत करने और एक घूर्णी गति को निष्पादित करने के लिए निर्देश देते हैं। एक इष्टतम टोक़ के साथ।
हॉल प्रभाव सेंसर ज्यादातर बीएलडीसी मोटर्स में प्रभावी रूप से नियोजित होते हैं जो आकार में अपेक्षाकृत बड़े होते हैं, लेकिन छोटे मोटर्स जैसे सीपीयू प्रशंसकों, सीपीयू ड्राइव, डीवीडी प्लेयर, छोटे निकास प्रशंसकों में, क्वाडकोप्टर में प्रयुक्त मोटर्स के लिए, हॉल प्रभाव सेंसर अनुचित बन सकते हैं। और इसलिए एक वैकल्पिक सेंसर कम दृष्टिकोण लागू किया जाता है।
इसमें विंडिंग की निहित ईएमएफ बिजली का शोषण शामिल है जो कि घुमावदार घुमाव के घुमावदार सेट को संसाधित करने और निष्पादित करने के लिए संदर्भ स्रोत के रूप में लिया जाता है।

एक BLDC रोटर आंदोलन का अनुकरण
उपरोक्त क्रूड सिमुलेशन में हम कल्पना कर सकते हैं कि जारी की गई ईएमएफ को किस तरह से संदर्भ के रूप में लिया गया है और घुमावदार के बाद के सेटों के लिए अनुक्रमण दालों के उत्पादन के लिए उपयोग किया जाता है, केंद्रीय स्थायी चुंबक रोटर पर एक घूर्णन टोक़ लगाता है। सिमुलेशन सटीक प्रतिकृति नहीं हो सकता है, फिर भी यह कार्य सिद्धांत का एक मोटा विचार देता है।
यह ध्यान रखना दिलचस्प है कि पल्स तब स्विच किया जाता है जब चुंबक का एन / एस घुमावदार कोर के केंद्र में होता है, जो नाड़ी या ध्रुवता के आधार पर एन या एस के रूप में या तो एनर्जेट करने में सक्षम बनाता है और एक आकर्षित और दोहराव उत्पन्न करता है। एन / एस मैग्नेट पर बल, जिससे अधिकतम संभव स्तर पर आवश्यक टोक़ उत्पन्न होता है।
और यह बदले में पिछले घुमावदार के स्विचिंग के माध्यम से जारी ईएमएफ के कारण संभव हो जाता है।
उपरोक्त चर्चा सेंसर कम बीएलडीसी मोटर के काम को स्पष्ट करती है, अब आइए जानें कि एक निर्दिष्ट सर्किट 3 चरण स्विचिंग के उपरोक्त जटिल निष्पादन को कैसे संभालता है
BLDC ड्राइवर DRV10963
कुछ Googling के बाद मुझे यह सेंसरलेस BLDC ड्राइवर सर्किट सिंगल चिप DRV10963 का उपयोग करते हुए मिला, जो कॉन्फ़िगरेशन में भागों की नगण्य मात्रा को नियोजित करता है और फिर भी इच्छित कार्यों के लिए एक परिष्कृत प्रसंस्करण को लागू करने में सक्षम है।
DRV10963 एक अत्याधुनिक चिप है जो विशेष रूप से सेंसर को कम करने वाली BLDC मोटर्स को संचालित करने के लिए डिज़ाइन किया गया है, जो कि मोटर घुमावदार से पीछे EMF की आशंका और घुमावदार पर एक सटीक कमांड देने और रोटर के ऊपर एक इष्टतम घूर्णी टॉर्चर को पूरा करने के लिए है।
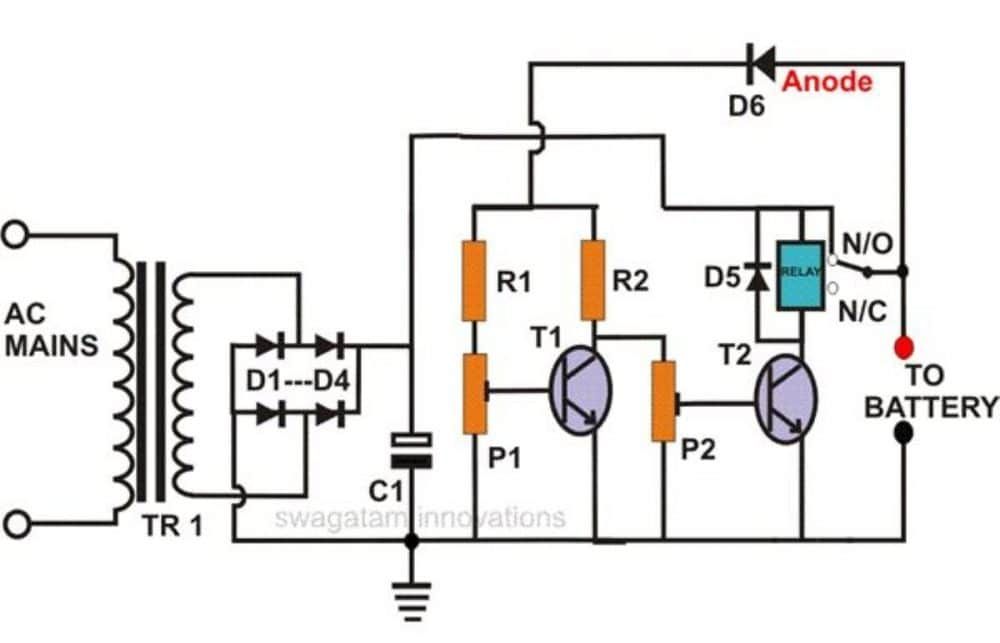
सर्किट आरेख

उपरोक्त छवि सर्किट के सरल लेआउट को दिखाती है जिसमें स्पष्ट रूप से आईसी के अलावा कुछ भी शामिल नहीं है।
विभिन्न पिनआउट को निर्दिष्ट कार्यों जैसे कि मोटर के पीडब्लूएम नियंत्रण, दिशा नियंत्रण आदि के लिए आवंटित किया जाता है, बस एक बाहरी स्रोत से निर्दिष्ट डेटा के साथ प्रासंगिक पिनआउट खिलाते हैं।
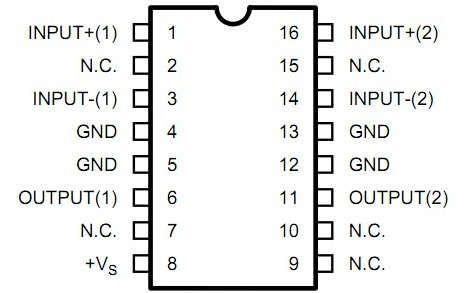
निम्नलिखित छवि चिप के पैकेज को दिखाती है, जो 10 पिन डीआईएल आईसी की तरह दिखता है, उसी के विभिन्न पिनआउट कार्यों को डेटा से अध्ययन किया जा सकता है जैसा कि आरेख के तहत सुसज्जित है:

प्रस्तावित सेंसरलेस BLDC ड्राइवर सर्किट के सर्किट आरेख का जिक्र जैसा कि पिछले लेख और ऊपर चिप छवि में प्रस्तुत किया गया है, पिनआउट विवरण को इस प्रकार समझा जा सकता है:
आईसी पिनआउट विवरण
FG = यह मोटर स्पीड इंडिकेटर पिन (आउटपुट) है, जो एक आंतरिक बीजेटी के साथ एक खुले कलेक्टर मोड में धांधली है।
ओपन कलेक्टर संकेत करता है कि इस पिनआउट पर आउटपुट ओपन कलेक्टर और ग्राउंड में डूबने वाले लॉजिक्स के माध्यम से नकारात्मक पीडब्लूएम का उत्पादन करेगा, इस प्रकार एक वैध रीडिंग प्राप्त करने के लिए उपयोगकर्ता को इस ओपन कलेक्टर और पॉजिटिव सप्लाई (5V) में एक पुल अप रेज़िस्टर कनेक्ट करने की आवश्यकता होगी ) इस पिनआउट पर गति संकेत पूरा करने के लिए।
FGS = यह गति सूचक चयनकर्ता इनपुट है, जिसका अर्थ है कि संकेतक पिन FG को चालू / बंद करने के लिए एक तर्क उच्च या निम्न यहां प्रस्तुत किया जा सकता है।
Vcc = IC को संचालित करने में सक्षम करने के लिए सकारात्मक आपूर्ति, 5V से अधिक नहीं होनी चाहिए।
डब्ल्यू, यू और वी बीएलडीसी मोटर के लिए 3-चरण आउटपुट हैं जो इस आईसी के माध्यम से संचालित होने वाले हैं। यह मोटर कॉइल के आवश्यक सिंक्रनाइज़ स्विचिंग के लिए मोटर ईएमएफ दालों को संवेदन के लिए इनपुट की तरह भी कार्य करता है।
GND = Vdd पिन के संबंध में IC के नकारात्मक सप्लाई पिनआउट का संदर्भ देता है।
FR = मोटर की दिशा का चयन या कमांड करने में मदद करता है और सिस्टम संचालित होने के बाद गतिशील रूप से किसी भी समय बदल सकता है, बस एक बाहरी तर्क उच्च या तर्क कम करके।
PWM = यह एक से PWM नियंत्रण इनपुट को दर्शाता है बाहरी PWM तरंग जनरेटर।
यह पीडब्लूएम इनपुट कनेक्टेड बीएलडीसी मोटर के वांछित गति नियंत्रण को लागू करने के लिए परिवर्तनशील हो सकता है।
चिप के केंद्र में बिंदीदार स्थान थर्मल पैड को इंगित करता है, जिसे चिप पर संभव हीट जनरेशन को सिंक करने के लिए एक हीट सिंक के साथ दबाया या दबाया जा सकता है, जबकि इसका उपयोग लोडेड बीएलडीसी मोटर के साथ किया जा रहा है।
उपरोक्त चर्चा सेंसर रहित BLDC मोटर ड्राइवर चिप DRV10963 के पिनआउट या कनेक्शन विवरण को बताती है, अब निम्नलिखित बिंदुओं की मदद से चिप के आंतरिक विन्यास और कार्यप्रणाली का विश्लेषण करते हैं:
यन्त्र की विशेषताएं
DRV10963 बिल्ट-इन पावर MOSFETs (3-चरण H-bridged) के साथ एक 3 चरण सेंसर रहित इलेक्ट्रिक मोटर ऑपरेटर है। यह उच्च उत्पादकता, कम शोर और न्यूनतम माध्यमिक सामग्री गिनती मोटर ड्राइव कार्यों के लिए अनुकूलित है। एक्सक्लूसिव सेंसरलेस विंडो- Iess 180 ° साइनसोइडल मैनेजमेंट स्कीम शोर-मुक्त मोटर कम्यूट दक्षता प्रदान करती है।
DRV10963 एक स्मार्ट लॉक डिटेक्ट फंक्शनलिटी से बना है, जिसमें सिक्योर परफॉर्मेंस हासिल करने के लिए सप्लीमेंट्री इन-बिल्ट सिक्योरिटी सर्किट्स के साथ रखा गया है। DRV10963 को एक थर्मल थर्मल मैट के साथ थर्मल-कुशल 10- पिन USON पैकिंग में पाया जा सकता है।
आईसी कैसे काम करता है
DRV10963 उत्पाद इन्फ्यूज्ड पावर MOSFETs के साथ 3 चरण सेंसर रहित मोटर ऑपरेटर है, यह है
विशेष रूप से बेहतर प्रदर्शन, कम प्रतिध्वनि और न्यूनतम सतही भाग की गणना के लिए बनाई गई मोटर ड्राइव फ़ंक्शन।
प्रिंसिपल सेंसरलेस विंडो-कम 180 ° साइनसॉइडल कंट्रोल प्लान विद्युत रूप से उत्तेजित टॉर्क रिपल नाममात्र को बनाए रखकर नीरव मोटर कार्य को प्रस्तुत करता है। प्रारंभ होने पर, DRV10963 डिवाइस FR इनपुट पिन के माध्यम से निर्दिष्ट पाठ्यक्रम में मोटर को चालू करने वाला है।
DRV10963 चिप एक sinusoidal नियंत्रण योजना का उपयोग कर 3 चरण BLDC मोटर बनाने जा रहा है।
नियोजित साइनसोइडल चरण वोल्टेज का महत्व PWM पिन के कर्तव्य चक्र पर निर्भर करता है। जबकि मोटर चलती है, DRV10963 आईसी एफजी पिन पर वेग डेटा बचाता है।
DRV10963 यूनिट में स्मार्ट लॉक सेंस क्षमता होती है। इस तरह की घटना में जिसमें मोटर को एक बाहरी दबाव से मारा जाता है, प्रोग्राम लॉकिंग समस्या की पहचान करने वाला है और मोटर के साथ-साथ अपने आप को सुरक्षित करने के लिए उपाय करेगा।
लॉक सेंस सर्किट की विशेष प्रक्रिया को लॉक डिटेक्शन में विस्तार से दर्शाया गया है। DRV10963 आईसी इसके अलावा वर्तमान सुरक्षा, वोल्टेज संरक्षण, वोल्टेज संरक्षण के तहत, और तापमान संरक्षण पर उदाहरण के लिए कई में निर्मित सुरक्षा सर्किट शामिल हैं।
विशेषता व्याख्या
स्पीड इनपुट और नियंत्रण
DRV10963 3-चरण 25-kl-lz PWM आउटपुट प्रस्तुत करता है, जिसमें चरण-दर-चरण साइनसोइडल तरंगों का मानक प्रतिशत हो सकता है। यदि कोई भी चक्र जमीन के संबंध में निर्धारित किया जाता है, तो पता चला है कि तरंग का पीडब्लूएम संरक्षित साइनसॉइड 3 क्रम हार्मोनिक्स के साथ संयुक्त है जैसा कि चित्र 2 में दिखाया गया है।

यह कोडिंग रणनीति ड्राइवर विनिर्देशों को इस कारण से सुव्यवस्थित करती है कि शायद एक चरण का आउटपुट होगा जो शून्य के बराबर हो सकता है।
परिणाम आयाम आपूर्ति वोल्टेज (VCC) और शासित PWM कर्तव्य चक्र (PWM) के अनुसार समीकरण 1 में परिभाषित किया गया है और चित्र 3 में हाइलाइट किया गया है। निर्देशित PWM कर्तव्य चक्र 100 PERCENT होने के बाद इष्टतम आयाम लागू होता है।
Vphpk = PWMdc>

मोटर गति को पीडब्लूएम आदेश के उपयोग के माध्यम से सीधे नियंत्रित नहीं किया जाता है ताकि मोटर के लिए उपयोग किए जाने वाले चरण के वोल्टेज के आयाम को विनियमित किया जा सके।
PWM इनपुट के कर्तव्य चक्र को 9 बिट डिजिटल मात्रा (0 से 511 तक) में संशोधित किया गया है।
विनियमन संकल्प 1/512 == 0.2% है। कर्तव्य चक्र विश्लेषक इनपुट ड्यूटी चक्र और 9 बिट्स डिजिटल आंकड़ा के बीच एक प्रारंभिक ऑर्डर एक्सचेंज ऑपरेशन की सुविधा देता है।
यह चित्रा 4 में हाइलाइट किया गया है, जिसमें आर = 80 एमएस।

पीडब्लूएम के बीच विनिमय प्रदर्शन का आदेश दिया गया था कि चक्र के साथ-साथ अधिकतम आयाम DRV10963 डिवाइस में है।
पीडब्लूएम कमांड> न्यूनतम कामकाज ड्यूटी चक्र जब समीकरण 1 द्वारा परिणाम अधिकतम आयाम पर चर्चा की जाती है। सबसे कम ऑपरेशन ड्यूटी चक्र अक्सर 13%, 10%, 5% या OTP सेटिंग द्वारा कोई प्रतिबंध नहीं स्थापित होता है (MINOP_DC1: 0)।
तालिका 1 न्यूनतम संचालन कर्तव्य चक्र के लिए अनुशंसित कॉन्फ़िगरेशन प्रदर्शित करता है।
जब भी पीडब्लूएम ने निर्देश दिया कि कर्तव्य चक्र न्यूनतम कामकाजी कर्तव्य चक्र से कम है और 1.5% से अधिक है, तो उत्पादन न्यूनतम संचालन कर्तव्य चक्र पर विनियमित होने वाला है। किसी भी समय इनपुट ड्यूटी चक्र 1.5% से कम है, DRV10963 डिवाइस संभवतः आउटपुट नहीं चलाएगा, और स्टैंडबाय मोड पर भेजा जाता है।
यह चित्र 6 में चित्रित किया जा सकता है।

घूर्णी विन्यास
DRV10963 एक तकनीक के माध्यम से मोटर शुरू करेगा जो चित्र 7 में बारीक रूप से विस्तृत है।

मोटर इनिशियलाइज़ेशन ग्राफ में ओपन लूप से क्लोज़ लूप चेंजओवर लिमिट (HOW।), एलाइन टाइम (TAHQH), और एक्सीलेंट रेट (RACE) के लिए डिवाइस कॉन्फिगरेबल ऑप्शंस होते हैं।
कम्यूटेशन लॉजिक के लिए रोटर को लाइन करने के लिए DRV10963 चरणों V और W पर एक ही समय में GND पर चरण U को नियंत्रित करने पर x% कर्तव्य चक्र निष्पादित करता है।
यह परिदृश्य TAIign सेकंड के लिए निरंतर है। VCC वोल्टेज द्वारा x% महत्व की पहचान की गई है (जैसा कि तालिका 2 में दिखाया गया है) विभिन्न विभिन्न आपूर्ति वोल्टेजों पर पर्याप्त घूर्णी टोक़ को बनाए रखने के लिए।
जैसा कि संरेखित अनुक्रम पूरा होता है, मोटर को पीयू के स्तर के साथ साइनसॉइडल चरण वोल्टेज पर डालकर गति करने के लिए मजबूर किया जाता है जैसा कि तालिका 2 में चित्रित किया गया है और आरएसीई द्वारा प्रतिनिधित्व विस्तार दर पर कम्यूटेशन रेंज के माध्यम से बढ़ाकर तब तक होता है जब तक कि प्रतिनियुक्ति का स्तर होम तक नहीं बढ़ता है ।, हर्ट्ज।
जैसे ही यह सीमा समाप्त हो जाती है, DRV0l0963 बंद लूप मोड में परिवर्तित हो जाता है जिससे कम्यूटेशन ड्राइव की प्रगति इन-बिल्ट कंट्रोल एल्गोरिथम द्वारा पहचानी जाती है, जबकि नियोजित वोल्टेज को PWM अनिवार्य ड्यूटी साइकिल इनपुट द्वारा पहचाना जाता है।
ओपन लूप टू लूप चेंजओवर लिमिट (होम), एलाइन टाइम (TAHQH), और स्पीड रेट (RACE) OTP कॉन्फ़िगरेशन के माध्यम से कॉन्फ़िगर करने योग्य हैं।
हैंडऑफ थ्रेशोल्ड (HOW) का चयन आमतौर पर परीक्षण और त्रुटि मूल्यांकन द्वारा अनुमोदित किया जाता है। उद्देश्य एक हैंडऑफ़ सहिष्णुता को प्राथमिकता देना होगा जो कम संभव हो सके और खुले लूप त्वरण और बंद लूप त्वरण के बीच मोटर को अनायास और वफादार बदलाव के लिए सक्षम बनाता है।
सामान्य रूप से बढ़ी हुई गति मोटर्स (अधिकतम गति) को एक बेहतर हैंडऑफ़ सहिष्णुता की आवश्यकता होती है, क्योंकि इस तथ्य के कारण उच्च गति वाले मोटर्स में केटी की कमी होती है इसलिए अधिक सस्ती बीईएमएफ।
तालिका 3 हैंडऑफ़ सहिष्णुता के लिए विन्यास योग्य वरीयताओं को प्रदर्शित करती है। एक विशिष्ट सबमिशन के लिए वांछनीय हैंडऑफ स्पीड चुनने में मदद करने के लिए इलेक्ट्रिकल हर्ट्ज में उच्चतम गति को एक संदर्भ के रूप में साबित किया जाता है।

संरेखित समय (TAHQH) और गति में तेजी (RACE) का विकल्प परीक्षण और त्रुटि परीक्षा पर भी आकस्मिक हो सकता है।
अधिक जड़ता वाले मोटर्स सामान्य रूप से विस्तारित संरेखित समय की मांग करते हैं और कम जड़ता वाले मोटर्स के विपरीत एक अधिक सुस्त गति की दर है जो आमतौर पर एक तेज गति प्रतिशत के साथ एक ब्रीफ़र संरेखित समय की मांग करते हैं। प्रोग्राम ट्रेडऑफ़ को लॉन्च की स्थिरता को भुनाने के लिए लागू करने की आवश्यकता है क्योंकि अवधि को घुमाने के लिए विरोध किया जाता है।
अधिकतम गहनता दर के समर्थन में टॉर्क को समय से कम करने के लिए कम गहन विन्यास (धीमी गति और महत्वपूर्ण Tmign) पर निर्णय लेने के साथ शुरू होने वाले टीआई एंडोर्स।
जैसे ही उपकरण को कर्तव्यनिष्ठा से प्रदर्शन करने के लिए पुष्टि की जाती है, अतिरिक्त बल विन्यास (अधिक RACC और उससे कम TAHQH) का उपयोग मोड़ के समय को कम करने के लिए किया जा सकता है और साथ ही सावधानीपूर्वक पूर्णता दर का ध्यान रखते हुए किया जा सकता है।
तालिका 4 TA'g, और RACE के लिए कॉन्फ़िगर करने योग्य सेटिंग्स प्रदर्शित करता है।

इस सेंसरलेस BLDC IC के बारे में स्पष्टीकरण का शेष भाग सुसज्जित है इस मूल डेटाशीट में
उपरोक्त बेतुके BLDC मोटर ड्राइवर सर्किट विवरण के बारे में अधिक जानने के लिए कृपया बेझिझक टिप्पणी करें
पिछला: 12 वी एलईडी बैकपैक विद्युत आपूर्ति सर्किट अगला: MCU के बिना Quadcopter रिमोट कंट्रोल सर्किट