एक पिक एंड प्लेस रोबोट वह है जिसका उपयोग किसी वस्तु को लेने और उसे इच्छित स्थान पर रखने के लिए किया जाता है। यह एक बेलनाकार रोबोट हो सकता है जो क्षैतिज, ऊर्ध्वाधर और घूर्णी कुल्हाड़ियों में गति प्रदान करता है, एक गोलाकार रोबोट जो दो घूर्णी और एक रैखिक आंदोलन, एक मुखर रोबोट या एक स्कारा रोबोट (3 ऊर्ध्वाधर अक्षों वाले रोटरी हथियारों के साथ निश्चित रोबोट) प्रदान करता है।
लाभ
आगे बढ़ने से पहले, आइए देखते हैं कि रोबोट को पसंद करने के लिए कुछ कारण क्यों पसंद किए जाते हैं:
- वे तेजी से हैं और अपने मानव समकक्षों की तुलना में सेकंड में काम कर सकते हैं।
- वे लचीले हैं और उनके पास उपयुक्त डिज़ाइन है।
- वे सटीक हैं।
- वे काम के माहौल की सुरक्षा को बढ़ाते हैं और वास्तव में कभी थकते नहीं हैं।
एक पिक एन प्लेस रोबोट के हिस्से

एन प्लेस रोबोट उठाओ
आइए देखें कि वास्तव में रोबोट और पिक प्लेस क्या हैं:
- रोवर को : यह रोबोट का मुख्य शरीर है जिसमें कई कठोर शरीर होते हैं जैसे सिलेंडर या गोला, जोड़ और लिंक। इसे मैनिपुलेटर के रूप में भी जाना जाता है।
- अंत प्रेरक : यह रोवर के अंतिम जोड़ से जुड़ा शरीर है जिसका उपयोग वस्तुओं को जकड़ने या संभालने के लिए किया जाता है। यह मनुष्य की बांह की एक उपमा हो सकती है।
- एक्चुएटर : वे रोबोट के चालक हैं। यह वास्तव में रोबोट को सक्रिय करता है। यह सर्वो मोटर, स्टेपर मोटर या वायवीय या हाइड्रोलिक सिलेंडर जैसी कोई भी मोटर हो सकती है।
- सेंसर: उनका उपयोग आंतरिक और बाहरी राज्य को समझने के लिए किया जाता है ताकि यह सुनिश्चित हो सके कि रोबोट पूरी तरह से सुचारू रूप से कार्य करता है। सेंसर में टच सेंसर, आईआर सेंसर आदि शामिल हैं।
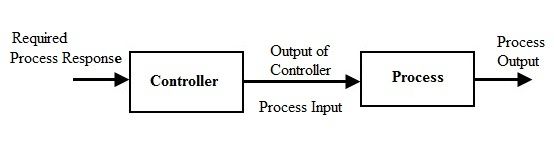
- नियंत्रक : इसका उपयोग सेंसर फीडबैक के आधार पर एक्ट्यूएटर्स को नियंत्रित करने के लिए किया जाता है और इस प्रकार प्रत्येक और प्रत्येक संयुक्त की गति को नियंत्रित करता है और अंत में एंड इफ़ेक्टर की गति को नियंत्रित करता है।
बेसिक पिक एन प्लेस रोबोट का कार्य:
का मूल कार्य a रोबोट को चुनें और रखें इसके जोड़ों द्वारा किया जाता है। जोड़ों को मानव जोड़ों के अनुरूप है और रोबोट में दो लगातार कठोर निकायों में शामिल होने के लिए उपयोग किया जाता है। वे रोटरी संयुक्त या रैखिक संयुक्त हो सकते हैं। रोबोट के किसी भी लिंक के लिए एक जोड़ जोड़ने के लिए, हमें उस शरीर के हिस्से की स्वतंत्रता और आंदोलन की डिग्री के बारे में जानना होगा। स्वतंत्रता की सीमाएं शरीर के रैखिक और घूर्णी आंदोलन को लागू करती हैं और आंदोलन की डिग्री का अर्थ है कि शरीर कितनी धुरी को स्थानांतरित कर सकता है।

एक साधारण पिक एन प्लेस रोबोट
एक साधारण पिक एंड प्लेस रोबोट में दो गतिशील पिंड शामिल होते हैं, जो एक संयुक्त आधार के साथ जुड़े होते हैं, रोटरी जोड़ के साथ। एक रोटरी संयुक्त वह है जो कुल्हाड़ियों में से किसी एक के आसपास 360 डिग्री में रोटेशन प्रदान करता है।
- नीचे या आधार पहियों के साथ जुड़ा हुआ है जो रैखिक आंदोलन प्रदान करते हैं।
- १अनुसूचित जनजातिकठोर शरीर को ठीक किया जाता है और दूसरे कठोर शरीर का समर्थन करता है जिससे अंतिम प्रभाव प्रदान किया जाता है।
- 2एन डीकठोर शरीर को सभी 3 अक्षों में गति प्रदान की जाती है और इसमें 3 डिग्री स्वतंत्रता होती है। यह 1 से जुड़ा हैअनुसूचित जनजातिएक घूर्णी संयुक्त के साथ शरीर।
- अंतिम प्रभावकारक को घटक के सभी पक्षों तक पहुंचने के लिए, किसी भी ऊंचाई तक स्थिति लेने के लिए, स्वतंत्रता के सभी 6 डिग्री को समायोजित करना चाहिए।
कुल मिलाकर, मूल पिक एंड प्लेस रोबोट इस प्रकार काम करता है:
- आधार के नीचे के पहिये रोबोट को वांछित स्थान पर ले जाने में मदद करते हैं।
- अंतिम प्रभाव का समर्थन करने वाला कठोर शरीर झुकता है या उस स्थिति तक पहुंचने के लिए सीधा होता है जहां वस्तु रखी जाती है।
- अंतिम प्रभावकार एक मजबूत पकड़ के साथ वस्तु को उठाता है और इसे वांछित स्थान पर रखता है।
अब जब हमें पिक एंड प्लेस रोबोट का एक संक्षिप्त विचार मिल गया है, तो मूल प्रश्न यह है कि इसे वास्तव में कैसे नियंत्रित किया जाता है।
एक साधारण पिक एंड प्लेस रोबोट को उसके अंतिम प्रभावकार की गति को नियंत्रित करके नियंत्रित किया जा सकता है। गति का उपयोग हाइड्रोलिक गति का उपयोग किया जा सकता है, अर्थात रोबोट को ड्राइव करने के लिए दबाव में हाइड्रोलिक तरल पदार्थ का उपयोग करना, या वायवीय गति का उपयोग करना, अर्थात यांत्रिक गति का कारण बनने के लिए दबाव वाली हवा का उपयोग करना। हालांकि सबसे प्रभावी तरीका आवश्यक गति प्रदान करने के लिए मोटर्स का उपयोग कर रहा है। रोबोट और अंतिम प्रभावकार को आवश्यक गति प्रदान करने के लिए मोटर्स को नियंत्रित किया जाना है।
पिक एन प्लेस रोबोट को नियंत्रित करने का कार्य उदाहरण
कैसे कीपैड पर सिर्फ कुछ बटन के साथ रोबोट को नियंत्रित करने के बारे में? जी हां संभव है! बस आवश्यक बटन दबाते हुए, हम अपने कार्य को प्राप्त करने के लिए किसी भी दिशा में आगे बढ़ने के लिए रोबोट को कमांड प्रेषित कर सकते हैं। इसके अलावा यह सरल वायरलेस संचार का उपयोग करके प्राप्त किया जा सकता है।
आइए देखें कि यह वास्तव में कैसे काम करता है:
ट्रांसमीटर के हिस्से में माइक्रोकंट्रोलर से जुड़े कीपैड होते हैं। दशमलव प्रारूप में किसी भी बटन संख्या को माइक्रोकंट्रोलर द्वारा 4 अंकों के बाइनरी में बदल दिया जाता है और इसके पोर्ट पर समानांतर आउटपुट एनकोडर पर लागू होता है। एनकोडर इस समानांतर डेटा को सीरियल डेटा में परिवर्तित करता है और यह ट्रांसमीटर को खिलाया जाता है, जो सीरियल डेटा को प्रसारित करने के लिए एंटीना के साथ फिट होता है।

ब्लॉक डायग्राम एक पिक एन प्लेस रोबोट के ट्रांसमीटर को दिखा रहा है
रिसीवर पक्ष में एक डिकोडर होता है जो माइक्रोकंट्रोलर के लिए हस्तक्षेप करता है। डिकोडर धारावाहिक प्रारूप में प्राप्त कमांड को समानांतर रूप में परिवर्तित करता है और इस डेटा को माइक्रोकंट्रोलर को देता है। इस आदेश के आधार पर माइक्रोकंट्रोलर मोटर चालकों को संबंधित मोटरों को चलाने के लिए उपयुक्त इनपुट सिग्नल भेजता है।

ब्लॉक डायग्राम एक पिक एन प्लेस रोबोट का रिसीवर दिखा
पूरे रोबोट को गति प्रदान करने के लिए प्रणाली में दो मोटर्स होते हैं और हाथ की गति प्रदान करने के लिए दो अन्य मोटर्स होते हैं। अंतिम प्रभावकार या ग्रिपर को इसे देने के लिए वस्तु पर उचित दबाव लागू करने के लिए, इसे देने के लिए नियंत्रित करने की आवश्यकता है ढीली पकड़ । यह उचित आदेश के माध्यम से हाथ मोटर्स को नियंत्रित करके सुनिश्चित किया जाता है। आर्म मोटर्स से आउटपुट 10Ohms / 2W रेसिस्टर से जुड़ा होता है और मोटर पर लोड या लॉक होने की स्थिति में, रेजिस्टर में एक उच्च वोल्टेज विकसित होता है, जो ऑप्टोइसोलरेटर और इंटरप्ट के आउटपुट पर एक लॉजिक उच्च स्तर का कारण बनता है। एक pnp ट्रांजिस्टर के माध्यम से ऑप्टोइसोलेटर आउटपुट से जुड़े माइक्रोकंट्रोलर के पिन को लॉजिक कम सिग्नल मिलता है, जो ग्रिपर के अन्य सभी ऑपरेशनों को रोक देता है।
इस प्रकार सरल आरएफ संचार के माध्यम से, हम वास्तव में एक पिक और जगह रोबोट को नियंत्रित कर सकते हैं।
पिक एंड प्लेस रोबोट के व्यावहारिक अनुप्रयोग:
- रक्षा अनुप्रयोग : इसका उपयोग निगरानी के लिए किया जा सकता है और बम जैसी हानिकारक वस्तुओं को लेने और उन्हें सुरक्षित रूप से फैलाने के लिए भी इस्तेमाल किया जा सकता है।
- औद्योगिक अनुप्रयोग : ये रोबोट विनिर्माण में उपयोग किए जाते हैं, आवश्यक भागों को लेने के लिए और मशीनरी स्थिरता को पूरा करने के लिए इसे सही स्थिति में रखते हैं। यह कन्वेयर बेल्ट पर वस्तुओं को रखने के लिए और साथ ही कन्वेयर बेल्ट से दोषपूर्ण उत्पादों को लेने के लिए भी इस्तेमाल किया जा सकता है।
- चिकित्सा अनुप्रयोग : इन रोबोटों को विभिन्न सर्जिकल ऑपरेशनों जैसे कि संयुक्त प्रतिस्थापन संचालन, आर्थोपेडिक और आंतरिक सर्जरी ऑपरेशन में इस्तेमाल किया जा सकता है। यह अधिक सटीकता और सटीकता के साथ संचालन करता है।
इन अनुप्रयोगों के अलावा, इन रोबोटों का उपयोग मानव जाति के लिए उपयुक्त विभिन्न अन्य अनुप्रयोगों में भी किया जा सकता है।
अब सवाल यह है कि वह दिन कितनी दूर है जब रोबोट इंसानों के लिए पूरी तरह से आसान हो जाएंगे?