लेख के इस भाग में हम इलेक्ट्रिक वाहनों में पेडल प्रेस तंत्र को एक समान रूप से भिन्न विद्युत संकेत में परिवर्तित करने के एक अभिनव तरीके के बारे में सीखते हैं, जिसका उपयोग वाहन के गति नियंत्रण को संसाधित करने के लिए आगे किया जा सकता है।
समझाया गया अवधारणा एक इलेक्ट्रॉनिक त्वरक की तरह काम करेगा, जो धीरे-धीरे पेडल को दबाए जाने पर वाहन की गति को बढ़ाएगा, और इसके विपरीत, PWM तकनीक का उपयोग करेगा
श्री लोकेष मैनी द्वारा विचार का अनुरोध किया गया था
तकनीकी निर्देश
मैं एक यांत्रिक व्यक्ति हूं, वर्तमान में एक इलेक्ट्रिक वाहन पर काम कर रहा हूं और मैं पेडल का उपयोग करके अपनी मोटर की गति को नियंत्रित करना चाहता हूं। मुझे मेरी मोटर के लिए एक नियंत्रक नहीं मिल रहा है कृपया मुझे अपना खुद का निर्माण करने में मदद करें मैं अत्यधिक हो जाऊंगा
कृतज्ञ
मोटर विनिर्देशों 36volt, 43amps और 1.5hp ब्रश डीसी मोटर हैं।
मैकेनिकल डिजाइन
पेडल एक्सीलरेटर के इलेक्ट्रॉनिक संस्करण को मुख्य रूप से पहले पैडल के यांत्रिक दबाव को एक अलग-अलग विद्युत सिग्नल में परिवर्तित करने के लिए एक तंत्र की आवश्यकता होगी, ताकि इस सिग्नल को सिग्नल प्रोसेसर चरण के माध्यम से एक व्यावहारिक गति नियंत्रण में वांछित रूपांतरण के लिए संसाधित किया जा सके। वाहन।
कई अवधारणाओं की कोशिश की जा सकती है जैसे कि एक पीजो लोड सेंसर, एक कैपेसिटिव लोड सेंसर, एक अनुनाद सेंसर आदि का उपयोग करके। इस लेख में हम एक बहुत सरल विधि सीखेंगे जो मेरे द्वारा तैयार की गई है जो उसी को प्राप्त करने के लिए एक एलईडी / एलडीआर असेंबली को शामिल करता है। ।

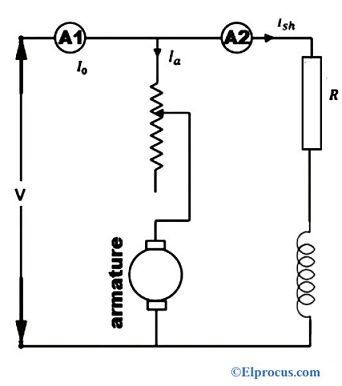
ऊपर दिए गए चित्र में दिखाए गए विद्युत व्यवस्था में हम निम्नलिखित एकीकृत घटकों को देख पा रहे हैं:
एक पेंच तंत्र के साथ एक छोटा गियर जुड़ा हुआ है।
सफेद मैट रिफ्लेक्टर सतह वाले पेंच का सिर
एक एलईडी / LDR विधानसभा पेंच सिर के सामने तैनात है।
प्रस्तावित तंत्र कैसे काम करता है।
उपरोक्त आकृति में दिखाए गए गियर को दूसरे गियर के साथ लॉक किया जाना है, जिसका अनुपात इस गियर से 10 गुना अधिक हो सकता है।
बड़े गियर को पेडल तंत्र के साथ कॉन्फ़िगर करने की आवश्यकता होती है, जैसे कि यह पेडल के दबाव के जवाब में एक घूर्णी आंदोलन शुरू करता है।
गियर से घूर्णी प्रतिक्रिया बारी-बारी से पूरे कक्ष में स्क्रू हेड की एक अग्रगामी गति उत्पन्न करती है जहां एलईडी / LDR असेंबली स्थित है।
यह प्रक्रिया एलडीआर द्वारा प्राप्त की जाने वाली एलईडी से परावर्तित प्रकाश की एक अलग-अलग मात्रा का कारण होगी।
पेडल डिप्रेशन के अनुरूप यह अलग-अलग डेटा (एक अलग प्रतिरोध के रूप में) तब किसी विशेष वाहन के इच्छित गति नियंत्रण को लागू करने के लिए सिग्नल प्रोसेसर सर्किट को खिलाया जा सकता है।
में अगली पोस्ट हम PWM तकनीक का उपयोग करके सिग्नल प्रोसेसर चरण सीखेंगे।
में ऊपर का भाग हमने पेडल एक्शन को आनुपातिक रूप से भिन्न विद्युत संकेत में बदलने के लिए एक साधारण इलेक्ट्रोकेमिकल कनवर्टर असेंबली के बारे में सीखा।
पीडब्लू क्रिया को पीडब्लूएम में बदलना
अब एक सर्किट कार्यान्वयन का अध्ययन करते हैं जो हमें वाहन के इच्छित मोटर गति नियंत्रण के लिए पेडल इलेक्ट्रिक सिग्नल को एक अलग-अलग पीडब्लूएम सिग्नल में बदलने में सक्षम करेगा।

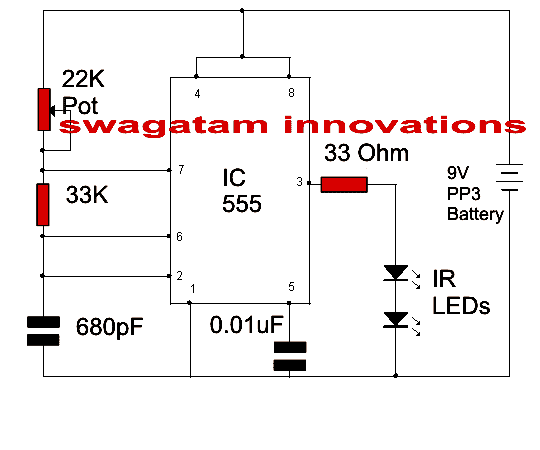
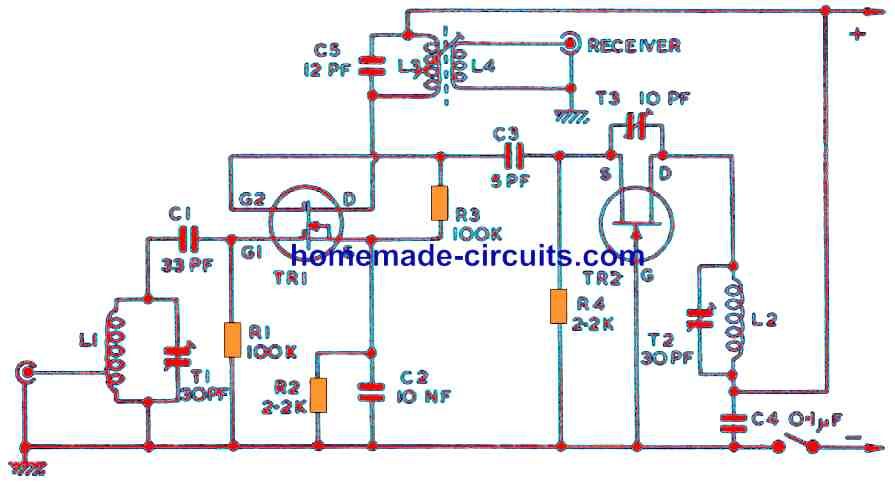
उपरोक्त सर्किट आरेख का जिक्र करते हुए हम निम्नलिखित बिंदुओं की मदद से सर्किट ऑपरेशन का आकलन कर सकते हैं:
IC1 को 80Hz पल्स जनरेटर के रूप में कॉन्फ़िगर किया गया है जिसमें अधिकतम ऑन टाइम और न्यूनतम ऑफ़ टाइम अपने ड्यूटी चक्र के रूप में है
IC2 एक तुलनित्र के रूप में धांधली है जो पहले pin2 पर लागू उपरोक्त 80 हर्ट्ज पल्स को अपने pin6 पर उत्पन्न त्रिकोण तरंगों के साथ परिवर्तित करता है और अपने pin5 पर उपलब्ध मॉड्यूलेटिंग वोल्टेज के साथ त्रिकोण तरंगों की तुलना करता है।
पिन 5 मॉड्यूलेटिंग वोल्टेज एक BJT BC547 एमिटर से लिया गया है, जिसे एक आम कलेक्टर के रूप में कॉन्फ़िगर किया गया है, जिसका आधार पेडल क्रियाओं से प्राप्त LDR इनपुट से जुड़ा है।
पेडल दबाने के जवाब में अलग-अलग प्रतिरोधों की तुलना 100K प्रीसेट सेटिंग के साथ की जाती है और वोल्टेज का एक आनुपातिक परिमाण ट्रांजिस्टर के आधार पर विकसित किया जाता है जो निम्न वर्तमान इनपुट को IC2 के पिन 5 के बराबर उच्च वर्तमान सिग्नल में परिवर्तित करता है।
इस तात्कालिक संभावित स्तर को स्वीकार किया जाता है और इसे IC2 द्वारा संसाधित किया जाता है, जो मस्जिद और कनेक्टेड मोटर के लिए PWM संकेतों का आनुपातिक परिमाण उत्पन्न करता है।
इस प्रकार मोटर गति को नियंत्रित किया जाता है और वाहन के पेडल प्रेसिंग के जवाब में उतार-चढ़ाव वाले PWM के अनुसार अलग-अलग होता है।
उपरोक्त प्रक्रियाएं प्रभावी रूप से पेडल कार्यों को वाहन मोटर और इसकी गति के नियंत्रित संचालन में बदल देती हैं।
सर्किट कैसे सेट करें।
यह बहुत आसान है।
- पेडल को उसके अधिकतम बिंदु तक दबाएं, जैसे कि स्क्रू हेड LED / LDR असेंबली के सामने निकटतम संभावित स्थिति तक पहुंचता है।
- अगला 100k पूर्व निर्धारित समायोजित करें जब तक कि IC2 का पिन 3 अधिकतम चौड़ाई के साथ पीडब्लूएम उत्पन्न करना शुरू नहीं करता है, इस बात की पुष्टि की जा सकती है कि पिन 3 पर वोल्टेज को मापने के लिए सर्किट के आपूर्ति वोल्टेज के जितना संभव हो उतना करीब हो, जो कि 5 वी है।
- एक बार यह पूरा हो जाने के बाद, सेटिंग की प्रक्रिया को पूर्ण माना जा सकता है।
- परिणामों को अब विभिन्न स्तरों पर पेडल को दबाकर और एक समान तरीके से मोटर की गति की जांच करके सत्यापित किया जा सकता है।
पिछला: सरल ईएसआर मीटर सर्किट अगला: ग्रो लाइट सर्किट कैसे बनाएं