पोस्ट एक सरल रेखा लेजर नियंत्रित मोटर चालक सर्किट की व्याख्या करता है, जो लाइन लेजर स्तर डिवाइस से उत्पन्न एक सटीक क्षैतिज लेजर लाइन का जवाब देकर काम करता है, और स्वचालित रूप से जुड़े उपकरण के संरेखण को समायोजित करता है या अत्यधिक पूर्णता और सटीकता के साथ काम करता है।
लाइन लेजर क्या है
लाइन लेजर उपकरण बढ़ईगीरी उम्र पुराने आत्मा स्तर संरेखक का एक उच्च परिशुद्धता इलेक्ट्रॉनिक प्रतिस्थापन है।
लाइन लेजर डिवाइस वास्तव में एक उन्नत लेजर उत्सर्जक उपकरण है जो 360 उत्पन्न कर सकता है ° सभी औद्योगिक या रचनात्मक इंजीनियरिंग नौकरियों के लिए एक कैलिब्रेटिंग संदर्भ प्रदान करने के लिए उच्च परिशुद्धता प्रबुद्ध क्षैतिज लेजर लाइन, ताकि नौकरी का अंतिम परिणाम पूरी तरह से सीधा हो और थोड़ी सी भी त्रुटि के बिना गठबंधन हो।
सर्किट ने इस ब्लॉग के समर्पित पाठकों में से एक श्री रफाल से अनुरोध किया था।
लाइन लेजर नियंत्रित मोटर की कार्य प्रक्रिया के बारे में विस्तृत चर्चा निम्न पैराग्राफ से सीखी जा सकती है:
डिजाइन उद्देश्य
श्री ग। रफाल: मैं इसके लिए बहुत नया हूं। मैंने पिछले कुछ हफ्तों में कुछ शोध किए हैं और मुझे ठीक वही नहीं मिला है जिसकी मुझे आवश्यकता है।
मैं किसी भी मदद के लिए आभारी रहूंगा। मैं अपने विचार की एक फोटो संलग्न करता हूं। मैं एक लेजर स्तर के साथ दो 12 वी डीसी मोटर्स को नियंत्रित करना चाहता हूं।
लाइन लेजर स्तर रिसीवर को संकेत देगा।

इस सिग्नल को फिर 12 वी डीसी मोटर की दिशा को नियंत्रित करना होगा। मोटर उपकरण की ऊंचाई को समायोजित करने के लिए थ्रेडेड रॉड को आगे और पीछे घुमाता है।
मुझे जो पता चला है, उसमें समानांतर में कई फोटोडायोड जुड़े होंगे, एक लेजर को शून्य स्तर से ऊपर और दूसरा उस स्तर से नीचे का पता लगाने के लिए। सिस्टम को जगाने के लिए फोटोडायोड्स के बीच अशक्त स्तर केवल कुछ प्रकार का ठहराव है। प्रदर्शन के बिना लेजर सेंसर। मैंने केवल एक सचित्र फोटो दिया।
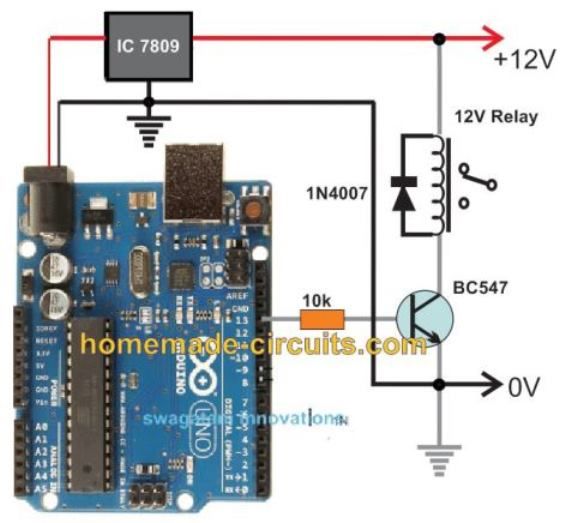
मुझे एक एच ब्रिज सर्किट की आवश्यकता है, लेकिन मेरे द्वारा पाए जाने वाले सभी का उपयोग एक Arduino सिस्टम के साथ किया जाना है। यदि आवश्यक हो, तो मैं $ 30 के उचित मूल्य के लिए तैयार पुल खरीद सकता हूं
आदर्श रूप से यह लाल और हरे दोनों लेज़रों के साथ काम करेगा, लेकिन तरंग दैर्ध्य इतने अलग हैं कि मुझे संदेह है कि यह किया जा सकता है और यह पूरे प्रकाश स्पेक्ट्रम में काम नहीं करेगा।
प्रारंभ में, मैं इंजन से जुड़ी इस बीम के स्तर को अप-डाउन बटन के साथ सेट करना चाहूंगा। मुझे खुशी होगी कि अगर दूसरी मोटर इसे स्थापित करते समय जाइरोस्कोप के साथ खुद को समतल करेगी, लेकिन अरुडिनो के बिना यह बहुत मुश्किल हो सकता है।
मुझे लगता है कि मैं जो करने की कोशिश कर रहा हूं वह इतना सरल है कि मैं Arduino का उपयोग किए बिना दूर हो सकता हूं। और मैं एक एनालॉग पर जोर देता हूं, एक निर्माण स्थल पर कठिन परिस्थितियों के कारण और यह मुझे लगता है कि अधिक इलेक्ट्रॉनिक्स, अधिक अविश्वसनीय डिवाइस।
यह केवल घर के अंदर काम करेगा, और लेजर की दूरी अधिकतम 10 मीटर है। शुरुआत में मुझे जो मोटर मिली थी उसमें 200mA अधिकतम 2.19 A की बड़ी चालू खपत थी, लेकिन एक बड़ा टॉर्क भी था।
पावर 18 वी डीसी एक मकिता बैटरी से।
किसी सुझाव के लिए अग्रिम धन्यवाद।
पोलैंड से शुभकामनाएँ
राफाल
लूट : मुझे मोटर शाफ्ट के काम के बारे में भ्रम है। दोनों मोटर्स पर थ्रेडेड पेंच टूल को धक्का देगा, लेकिन इसे वापस नहीं खींच सकता है? यह कैसे काम करता है?
क्या एक ही मोटर के साथ इसे लागू करना संभव है?
श्री ग। रफाल: निचले स्तर की स्ट्रेटेज शायद 70 सेमी होगी, केवल छोटे कमरे के लिए, उदा। एक शौचालय ताकि आप एक दरवाजे से प्रवेश कर सकें।
ड्राइव के बिना मशीन, हाथ से खींचा, केवल लेवलिंग स्ट्रेटेज। वीडियो में, मास्ट पर दो पीले रंग की वस्तुएं लेज़र डिटेक्टर हैं जो सीधे स्ट्रेटेज से जुड़ी होती हैं।
लेजर कहीं और दूर खड़ा है और यह एक क्षैतिज रेखा पैदा करता है।
मोटरों को एक गाड़ी से जोड़ा जाएगा और लेज़र डिटेक्टरों के साथ स्ट्रेटिंग को समतल करने के लिए थ्रेडेड स्क्रू। दोनों पक्षों को समतल करने के लिए दो मोटर होनी चाहिए, लेकिन यह एक दर्पण छवि है।
एकमात्र सामान्य हिस्सा एक दो-चैनल एच-ब्रिज होगा जैसे कि मैं इसे तैयार-किए गए मॉड्यूल और संभवत: एक गायरोस्कोप से कर रहा था, लेकिन यह एक सपना है :)।
यह महत्वपूर्ण है कि बाएं और दाएं मोटर्स के क्रांतियों के लिए बटन हैं।
प्रक्रिया यह है। मैं उदाहरण के लिए निर्धारित मंजिल स्तर से 2 मीटर ऊपर लेज़र लटकाता हूं। मैं लेजर बीम से 2 मीटर की दूरी पर स्ट्रेटेज के निचले किनारे तक मापता हूं।
मैं ऊँचाई-दाब के बटन को दायें-बायें दबाता हूँ, ताकि यह स्ट्रेट के निचले किनारे से 2 मीटर के बराबर हो। मैंने डिटेक्टरों को मस्तूलों पर रखा, ताकि फोटोडायोड वर्गों के बीच लेजर बीम शून्य स्तर पर हो। और बाकी काम वो खुद करेंगे
अटैचमेंट में मैंने डिटेक्टर ऑपरेशन की एक ड्राइंग डाली।
राफाल
सर्किट डिज़ाइन

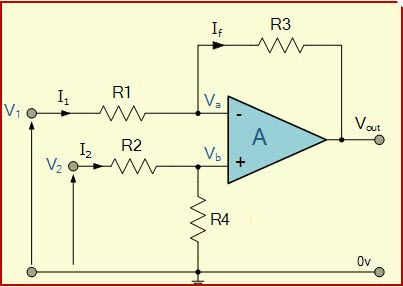
ऊपर दिए गए आंकड़े को देखते हुए, लेजर लाइन स्ट्रेटनेस सटीकता के संबंध में संबंधित मोटर नियंत्रित टूल का पता लगाने और सही करने के लिए दो समान सर्किट चरणों की आवश्यकता होगी।
नीचे दिखाए गए अनुसार दो समान चरण एक दूसरे के दर्पण चित्र हैं:

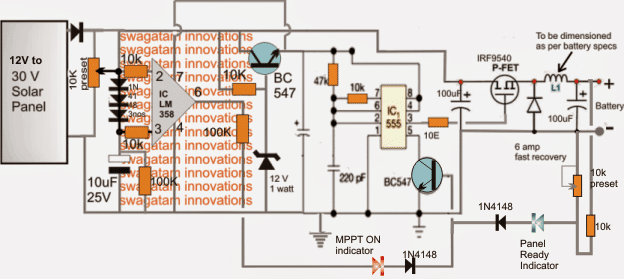
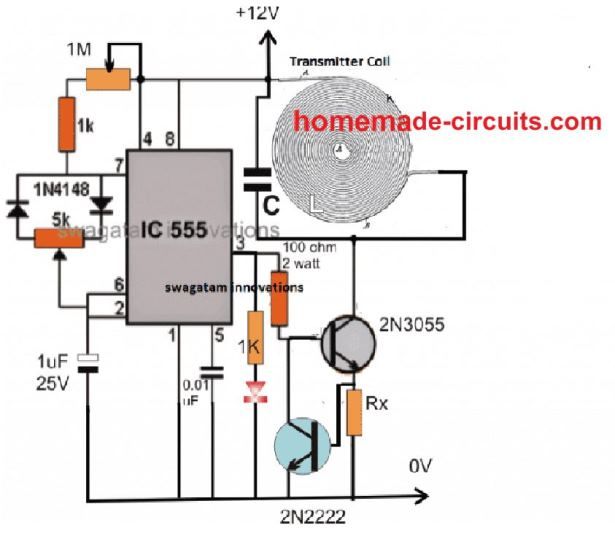
सर्किटरी काफी सीधी है। यह एक खिड़की तुलनित्र के साथ काम करता है जो यह सुनिश्चित करता है कि ड्राइव मोटर्स गैर-परिचालन हैं, जब तक कि LDRs की जोड़ी समान लेजर लाइन चमक के साथ सामने आती है।
एक आधा आपूर्ति वोल्टेज तब A1 के गैर-इनवर्टिंग इनपुट और A2 के इनवर्टिंग इनपुट पर उत्पन्न होता है।
जैसे ही लेजर लाइन में एक विक्षेपण का पता लगाया जाता है (जो कि मोटर नियंत्रित उपकरण को सीधे संरेखित नहीं किए जाने पर हो सकता है), LDRs R1 और R2 परिवर्तन को प्रभावित करने वाली चमक।
इस स्थिति में, विंडो तुलनित्र के लिए इनपुट वोल्टेज आधे आपूर्ति वोल्टेज से दूर चला जाता है। यह स्थिति मोटरबाइक नेटवर्क को क्लॉक वाइज या एंटीक्लॉकवाइज दिशाओं में स्थानांतरित करने के लिए तुलनित्र आउटपुट का कारण बनती है।
ट्रांजिस्टर T1। । । T4 को मोटर में स्विच करने में सक्षम करने के लिए एक पुल नेटवर्क की तरह कॉन्फ़िगर किया गया है आगे और रिवर्स दिशाओं LDR रोशनी या लेजर लाइन विचलन कोण पर निर्भर करता है।
डायोड D1। । । डी 4 उस समय के दौरान वोल्टेज चोटियों को रद्द करने के लिए तैनात किया जाता है जब मोटर अवेलेबल और रनिंग होता है। पूर्व निर्धारित पोटेंशियोमीटर P1 और P2 का कार्य संरेखण समायोजन की सुविधा के लिए है।
ये सुनिश्चित करने के लिए ठीक हैं कि मोटर पूरी तरह से बंद है और निष्क्रिय है जब तक कि प्रासंगिक LDR जोड़ी ठीक उसी लेजर प्रकाश चमक के संपर्क में है।
उदाहरण के लिए, मान लें कि मोटर नियंत्रित उपकरण के गलत संरेखण के कारण, लेजर लाइन झुकाव एलडीआर आर 1 की तुलना में एलडीआर आर 2 पर कम करने का कारण बनता है। यह वोल्टेज के परिणामस्वरूप बिंदु ए पर आधे से अधिक आपूर्ति वोल्टेज से ऊपर उठ जाएगा।
इस स्थिति में, A1 op amp आउटपुट उच्च हो जाता है, जिससे ट्रांजिस्टर T1 और T4 संचालित होते हैं। यह बदले में मोटर को प्रासंगिक दिशा में घुमाने का कारण बनता है। यह क्रिया स्वचालित रूप से कनेक्टेड टूल को एक सीधी रेखा में स्थानांतरित कर देती है जब तक कि इसकी क्षैतिज संरेखण सटीकता लेजर लाइन सटीकता के साथ मेल नहीं खाती।
इसके विपरीत, अगर हम उपकरण को विपरीत अभिविन्यास के साथ झुका हुआ मानते हैं जैसे कि LDRs की रोशनी ऊपर चर्चा की गई के विपरीत है, तो बिंदु A पर वोल्टेज आधे से कम आपूर्ति वोल्टेज का कारण बनता है। यह स्थिति आउटपुट A2 op amp को ट्रिगर करती है ताकि टी 3 और टी 2 चालू हो जाए।
यह मोटर अब विपरीत दिशा में चल रहा है, प्रासंगिक दिशा में उपकरण के संरेखण को ठीक करने के प्रयास में जब तक कि यह लेजर लाइन क्षैतिज सटीकता के साथ पूरी तरह से सीधे मेल नहीं खाता है।
ऊपर / नीचे बटन
शुरुआत में आत्मा स्तर की ऊंचाई को निर्धारित करने के लिए ऊपर के बटन को बस LDR के प्रत्येक के समानांतर पुश-बटन स्विच द्वारा लागू किया जा सकता है।
LDR स्थापना
LDRs से सही प्रतिक्रिया प्राप्त करने के लिए, बायां दाहिना जोड़ा एक नली के अंदर संलग्न होना चाहिए जैसे कि वे केवल लेजर रोशनी को 'देखने' में सक्षम हैं, न कि किसी अन्य परिवेश प्रकाश के लिए।
इस विचार को निम्नलिखित छवि में देखा जा सकता है:

यहां, हम देख सकते हैं कि LDR एक-दूसरे के बहुत करीब स्थित हैं, जो यह सुनिश्चित करते हैं कि जब लेजर लाइन सटीक केंद्र पर हो, दोनों LDR जोड़े का कुछ भाग लेजर प्रकाश द्वारा समान रूप से रोशन हो जाए।
एलडीआर बाड़े के सामने एक विसरित लेंस के साथ कवर किया जा सकता है, ताकि लेजर रोशनी को संबंधित एलडीआर के अंदर समान रूप से विसरित किया जा सके।
की एक जोड़ी: मूल्यवान आइटम की रक्षा के लिए सरल विरोधी चोरी अलार्म सर्किट अगला: यूनिवर्सल BJT, JFET, MOSFET परीक्षक सर्किट