

औद्योगिक स्वचालन और नियंत्रण
आजकल औद्योगिक स्वचालन प्रणाली कई उद्योगों में लोकप्रिय हो गए हैं और कई प्रक्रिया-संबंधित संचालन को नियंत्रित करने में महत्वपूर्ण भूमिका निभा रहे हैं। कारखाने या उद्योग पर उनके भौगोलिक वितरण के साथ विभिन्न प्रकार के औद्योगिक नेटवर्क के कार्यान्वयन के कारण, निम्न स्तर से लेकर उच्च-स्तरीय नियंत्रण तक फर्श डेटा स्थानांतरण और नियंत्रण क्षमता अधिक परिष्कृत और आसान हो गई है। इन औद्योगिक नेटवर्क को विभिन्न फील्ड बसों के माध्यम से रूट किया जाता है जो CAN प्रोटोकॉल, प्रोफिबस, मोडबस, डिवाइस नेट आदि जैसे विभिन्न संचार मानकों का उपयोग करते हैं, तो आइए हम देखते हैं कि कैसे संचार उद्योगों और अन्य को स्वचालित करने के लिए काम करता है। स्वचालन आधारित प्रणाली ।
औद्योगिक स्वचालन और नियंत्रण का परिचय
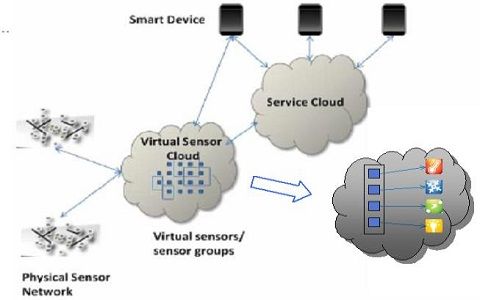
नीचे दिया गया आंकड़ा औद्योगिक स्वचालन और नियंत्रण की वास्तुकला को दर्शाता है जिसमें पूरे सिस्टम को स्वचालित करने के लिए नियंत्रण के तीन स्तरों का प्रदर्शन किया जाता है। ये तीन स्तर नियंत्रण और स्वचालन, प्रक्रिया नियंत्रण और उच्च-क्रम नियंत्रण हैं। नियंत्रण और स्वचालन स्तर में विभिन्न चर उपकरणों जैसे सेंसर और एक्ट्यूएटर होते हैं जो प्रक्रिया चर की निगरानी और नियंत्रण करते हैं।

औद्योगिक स्वचालन वास्तुकला
प्रक्रिया नियंत्रण स्तर एक केंद्रीय नियंत्रक है जो कई नियंत्रित उपकरणों को नियंत्रित करने और बनाए रखने के लिए जिम्मेदार है प्रोग्रामेबल लॉजिक कंट्रोलर्स (पीएलसी) , और भी SCADA की तरह यूजर ग्राफिकल इंटरफेस और मानव मशीन इंटरफ़ेस (HMI) इस स्तर में शामिल हैं। उच्च आदेश नियंत्रण स्तर एक उद्यम स्तर है जो व्यवसाय से संबंधित सभी कार्यों का प्रबंधन करता है।
उपरोक्त आरेख और इसके प्रत्येक स्तर और इन-बीच के स्तरों को बारीकी से देखने से, संचार बसें जैसे प्रोफिबस और औद्योगिक ईथरनेट सूचनाओं के आदान-प्रदान से जुड़े हुए हैं। इसलिए, संचार बस औद्योगिक स्वचालन में नियंत्रक, कंप्यूटर और क्षेत्र के उपकरणों से डेटा के विश्वसनीय हस्तांतरण के लिए प्रमुख घटक है।
नियंत्रण क्षेत्र नेटवर्क या कर सकते हैं प्रोटोकॉल

ओपन सिस्टम इंटरकनेक्शन (OSI) मॉडल
डेटा संचार एक बिंदु से दूसरे बिंदु पर डेटा का स्थानांतरण है। औद्योगिक संचार का समर्थन करने के लिए, अंतर्राष्ट्रीय मानकीकरण संगठन ने विभिन्न नोड्स के बीच डेटा हस्तांतरण प्रदान करने के लिए ओपन सिस्टम इंटरकनेक्शन (OSI) मॉडल विकसित किया है। यह OSI प्रोटोकॉल और फ्रेमवर्क निर्माता पर निर्भर करता है। CAN प्रोटोकॉल OSI मॉडल की सात परतों में से निचली दो परतों यानी भौतिक और डेटा लिंक परतों का उपयोग करता है।
एक नियंत्रक क्षेत्र नेटवर्क, या CAN प्रोटोकॉल एक बहु-मास्टर है सीरियल संचार बस , और यह स्वतंत्र नियंत्रकों का एक नेटवर्क है। CAN का वर्तमान संस्करण 1990 से उपयोग में है, और इसे बॉश और इंटेल द्वारा विकसित किया गया था। यह एक नेटवर्क में प्रस्तुत नोड्स को संदेश प्रसारित करता है, जिसमें 1 एमबीपीएस तक की गति होती है। एक प्रभावी प्रसारण के लिए, यह विश्वसनीय त्रुटि का पता लगाने के तरीकों का अनुसरण करता है - और, संदेश की प्राथमिकता और टकराव का पता लगाने पर मध्यस्थता के लिए, यह वाहक के उपयोग की सुविधा का उपयोग करता है। इन विश्वसनीय डेटा ट्रांसफर विशेषताओं के कारण, यह प्रोटोकॉल बसों, कारों और अन्य ऑटोमोबाइल सिस्टम, कारखाने और औद्योगिक स्वचालन, खनन अनुप्रयोगों आदि में उपयोग में रहा है।
डेटा ट्रांसमिशन कर सकते हैं
प्रोटोकॉल कर सकते हैं एड्रेस-आधारित प्रोटोकॉल नहीं है, लेकिन संदेश-उन्मुख प्रोटोकॉल है, जिसमें CAN में एम्बेडेड संदेश में डेटा और सामग्री को प्राथमिकता दी जा रही है। बस में डेटा के रिसेप्शन के आधार पर, प्रत्येक नोड यह तय करता है कि डेटा को छोड़ना है या प्रक्रिया करना है - और फिर सिस्टम के आधार पर, नेटवर्क संदेश को एकल नोड या कई अन्य नोड्स के लिए नियत किया गया है। क्या संचार किसी विशेष नोड को आरटीआर (रिमोट ट्रांजिट रिक्वेस्ट) भेजकर किसी अन्य नोड से जानकारी का अनुरोध करने की अनुमति देता है।

कर सकते हैं डेटा ट्रांसमिशन
यह उच्चतम-प्राथमिकता वाले संदेश को स्थानांतरित करके और निचले-प्राथमिकता वाले संदेश का इंतजार करके डेटा का स्वत: मध्यस्थता-मुक्त प्रसारण प्रदान करता है। इस प्रोटोकॉल में, प्रमुख एक तार्किक 0 है, और recessive एक तार्किक 1 है। जब एक नोड एक आवर्ती बिट को स्थानांतरित करता है और दूसरा एक हावी बिट को प्रसारित करता है, तो प्रमुख बिट जीतता है। एक प्राथमिकता-आधारित मध्यस्थता योजना यह तय करती है कि क्या एक ही समय में दो या दो से अधिक उपकरण प्रसारण शुरू करने की अनुमति दी जाएगी या नहीं।
संदेश फ्रेम कर सकते हैं
एक संचार नेटवर्क को विभिन्न फ्रेम या संदेश प्रारूपों से कॉन्फ़िगर किया जा सकता है।
- स्टैंडर्ड या बेस फ्रेम फॉर्मेट या कैन 2.0 ए
- विस्तारित फ़्रेम प्रारूप या कैन 2.0 बी

स्टैंडर्ड या बेस फ्रेम फॉर्मेट या कैन 2.0 ए
इन दो प्रारूपों के बीच अंतर यह है कि बिट्स की लंबाई, अर्थात, आधार फ्रेम पहचानकर्ता के लिए 11-बिट्स लंबाई का समर्थन करता है, जबकि विस्तारित फ्रेम पहचानकर्ता के लिए 29-बिट्स लंबाई का समर्थन करता है, जो 18-बिट एक्सटेंशन और से बना है एक 11-बिट पहचानकर्ता। आईडीई बिट भिन्न फ्रेम प्रारूप और कैन बेस फ्रेम प्रारूप में भिन्न हो सकता है जिसमें आईडीई को ए 11-बिट फ्रेम केस में प्रमुख के रूप में प्रसारित किया जाता है और 29-बिट फ्रेम मामले में अप्रभावी होता है। कुछ CAN नियंत्रकों द्वारा बेस फ्रेम प्रारूप में संदेश भेजना या प्राप्त करना भी संभव है जो विस्तारित-फ्रेम प्रारूपों का समर्थन करते हैं।

विस्तारित फ़्रेम प्रारूप या कैन 2.0 बी
कैन प्रोटोकॉल में चार प्रकार के फ्रेम होते हैं: डाटा फ्रेम, रिमोट फ्रेम, एरर फ्रेम और ओवरलोड फ्रेम। डेटा फ़्रेम में ट्रांसमिशन नोड डेटा रिमोट फ़्रेम अनुरोध होते हैं, विशिष्ट पहचानकर्ता ट्रांसमिशन त्रुटि फ़्रेम किसी भी नोड त्रुटियों का पता लगाता है और, जब सिस्टम डेटा या दूरस्थ फ़्रेम के बीच विलंब को इंजेक्ट करता है, तो अधिभार फ़्रेम सक्रिय हो जाता है। क्या संचार एक नेटवर्क पर 2032 उपकरणों को सैद्धांतिक रूप से जोड़ सकता है, लेकिन व्यावहारिक रूप से यह हार्डवेयर ट्रांसवर्स के कारण 110 नोड्स तक सीमित है। यह 250 केबीपीएस की बाउड दर के साथ 250 मीटर की दूरी पर केबल बिछाने का समर्थन करता है, 10 केबीपीएस की बिट दर 1 किमी की अधिकतम लंबाई है, और 1 एमबीपीएस के साथ सबसे कम 40 मीटर है।
कैन प्रोटोकॉल का उपयोग करके औद्योगिक स्वचालन और नियंत्रण
इस औद्योगिक को नियंत्रित करने के लिए परियोजना कार्यान्वित की जाती है लोड जो डीसी मोटर द्वारा प्रक्रिया के तापमान भिन्नता के आधार पर चलाया जाता है। विभिन्न प्रक्रिया नियंत्रण प्रणाली तापमान पर निर्भर हैं। मान लीजिए, एक स्टरर टैंक के मामले में - एक निश्चित तापमान तक पहुंचने के बाद - डीसी मोटर को स्टिरर को घुमाने के लिए चालू किया जाना चाहिए। इसलिए यह परियोजना CAN प्रोटोकॉल के उपयोग से इसे प्राप्त करती है जो अत्यधिक कुशल और विश्वसनीय कम लागत वाला संचार है।
इस परियोजना में दो माइक्रोकंट्रोलर्स का उपयोग किया जाता है, एक तापमान डेटा प्राप्त करने के लिए और दूसरा इसके लिए डीसी मोटर को नियंत्रित करना । कैन कंट्रोलर MCP2515 और कैन ट्रांसीवर MCP2551 डेटा के आदान-प्रदान के लिए CAN संचार लागू करने के लिए दोनों माइक्रोकंट्रोलर से जुड़े हैं।

कैन प्रोटोकॉल का उपयोग करके औद्योगिक स्वचालन और नियंत्रण
संचारण पक्ष माइक्रोकंट्रोलर लगातार LM35 के उपयोग के साथ तापमान की निगरानी करता है तापमान सेंसर एनालॉग वैल्यू को डिजिटल से जोड़कर ADC के साथ जोड़ा। इन मूल्यों की तुलना माइक्रोकंट्रोलर में प्रोग्राम किए गए सेट वैल्यू के साथ की जाती है, और जब माइक्रोकंट्रोलर भेजता है या इन मूल्यों का उल्लंघन किया जाता है रिसीवर को डेटा पहुंचाता है कन्ट कंट्रोलर और ट्रान्सीवर इकाइयों द्वारा साइड माइक्रोकंट्रोलर।
प्राप्त करने वाला पक्ष संचार डेटा प्राप्त कर सकता है और इसे माइक्रोकंट्रोलर को स्थानांतरित करता है जो डेटा को आगे की प्रक्रिया करता है और मोटर-चालक आईसी द्वारा डीसी मोटर को नियंत्रित करता है। माइक्रोकंट्रोलर द्वारा नियंत्रित चालक आईसी के साथ मोटर की दिशा को बदलना भी संभव है।
इस प्रकार CAN प्रोटोकॉल औद्योगिक वातावरण में विभिन्न नोड्स को जोड़कर सहकर्मी से सहकर्मी संचार को सक्षम बनाता है। इस तरह के संचार को अन्य में भी लागू किया जा सकता है स्वचालन प्रणाली जैसे घर या भवन , कारखाना, आदि हम आशा करते हैं कि इस लेख ने आपको CAN संचार के साथ औद्योगिक स्वचालन पर बेहतर समझ दी होगी। कृपया हमें आगे की जानकारी और प्रश्नों के लिए लिखें।
फ़ोटो क्रेडिट:





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}