इस पोस्ट में हम आंदोलनों के पसंदीदा सेट के साथ एक इनक्यूबेटर मोटर तंत्र के संचालन के लिए एक रिवर्स फॉरवर्ड टाइमर सर्किट सीखते हैं। श्री अनवर द्वारा विचार का अनुरोध किया गया था
तकनीकी निर्देश
मैं इंडोनेशिया से हूं ..... मुझे हाई टॉर्क मोटर (कार में डीसी मोटर पावर विंडो) के साथ इनक्यूबेटर टाइमर के लिए स्कैमैटिक्स चाहिए। मैं दो दिशाओं में चलने के लिए एक डीसी मोटर प्राप्त करने की कोशिश कर रहा हूं, जब तक कि यह अंतिम स्थिति तक नहीं पहुंच जाती है, तब तक ध्रुवता को रोकें और स्विच करें ताकि यह बिजली के पुन: लागू होने पर दूसरी दिशा को चलाए। फिर दूसरे सिरे पर भी ऐसा ही करें।
1. टाइमर 1min के लिए बिजली चालू करता है। (सुबह (:०० -7: ०१ बजे)
2. मोटर एक दिशा में चलती है जब तक कि वह स्टॉप पोजीशन को हिट न कर दे, 30sec कहिए।
3. मोटर के लिए बिजली बंद हो जाती है जब यह हिट की स्थिति को रोकता है और 1min के लिए देरी करता है। मुख्य शक्ति को समाप्त / बंद करने के लिए टाइमर। ध्रुवीयता को भी उलट देता है ताकि।
4. अगली बार जब मुख्य टाइमर आता है (10: 00-10: 01) यह एक ही चीज को उल्टी दिशा में और लगातार दोहराता है
5. 12 VDC मोटर रिवर्स (मोटर से सिर्फ दो केबल + और -)
6. रेव / एफडब्ल्यूडी मोटर के लिए एलईडी संकेतक की आवश्यकता है
क्या आप मेरी मदद कर सकते हैं सर?
किसी भी मदद के लिए पहले से ही शुक्रिया।
यह एक महत्वपूर्ण घर परियोजना है जिसे 100% विश्वसनीय होना चाहिए।
परिरूप

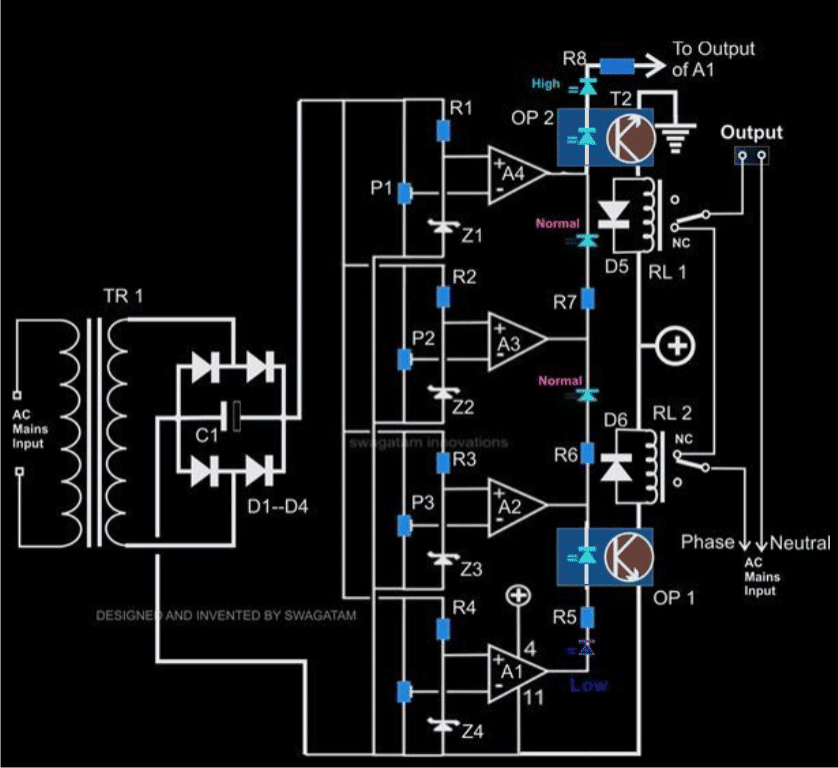
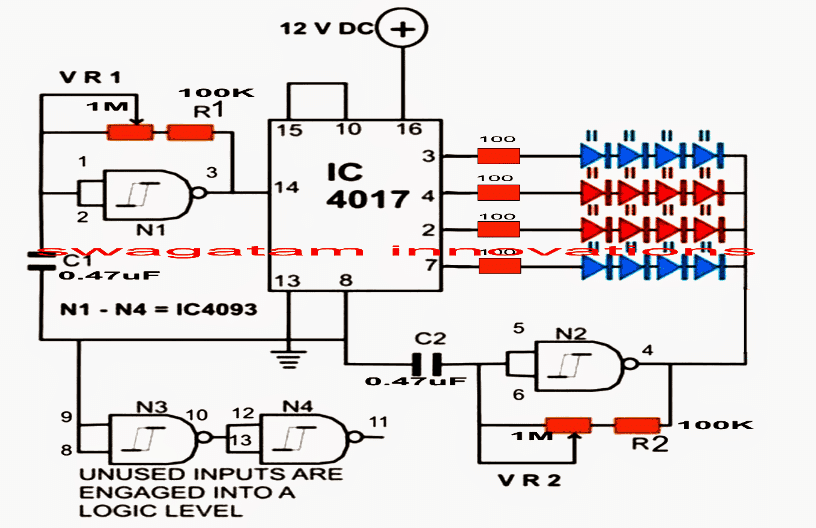
ऊपर दिए गए आंकड़े में हम समय के अंतराल के पूर्व निर्धारित सेट के बाद एक इनक्यूबेटर मोटर के प्रस्तावित रिवर्स फॉरवर्ड गति को लागू करने के लिए एक डिजाइन की कल्पना कर सकते हैं।
बिजली चालू होने पर तुरंत हमारे पास निम्नलिखित परिदृश्य होते हैं:
'सेट' के लिए चुंबकीय स्विच को निष्क्रिय अवस्था में या अवसादग्रस्त माना जा सकता है जबकि मोटर या डिज़ाइन इनक्यूबेटर तंत्र इसकी शून्य शुरुआत की स्थिति में है।
कृपया ध्यान दें कि अधिमानतः 'सेट' / 'रीसेट' स्विच को चुंबकीय रीड स्विच का उपयोग करके लागू किया जाना चाहिए।
के साथ बिजली चालू है, IC 4060 को C2 के माध्यम से रीसेट किया जाता है ताकि वह इसे शून्य से गिनती की प्रक्रिया शुरू करे, और pin3 को एक शून्य तर्क प्रदान किया जाता है।
यह प्रारंभिक शून्य तर्क C3 के माध्यम से T1 के आधार पर खिलाया जाता है जो तुरंत T3 और इसके संबद्ध रिले को सक्रिय करने के लिए संचालित करता है। इस प्रक्रिया में R7 सुनिश्चित करता है कि T1 / T3 इस मोड में लेट जाए।
इस बिंदु पर DPDT रिले अपने N / O संपर्कों को मोटर और तंत्र को एक मान्य 'फॉरवर्ड' गति की ओर ले जाता है।
जैसे ही मोटर चलना शुरू होता है, 'सेट' बटन ऐसे जारी किया जाता है कि T4 और ऊपरी SPDT को कार्य करने का अवसर मिलता है, जिसमें SPDT रिले एक स्टैंडबाय के साथ DPDT के N / C संपर्कों को प्रदान करने वाले N / O स्थिति में परिवर्तन करता है। आपूर्ति..
मोटर और / या तंत्र तब तक चलता रहता है जब तक कि वह 'रीसेट' स्थिति प्राप्त नहीं कर लेता है जिसके कारण T2 सक्रिय होता है और T1 / T4 कुंडी को तोड़ देता है।
टी 4 स्विच ऑफ होने के साथ, डीपीडीटी रिले एन / ओ से एन / सी तक अपनी स्थिति बदलता है और मोटर तंत्र के लिए एक विपरीत (रिवर्स) आंदोलन प्रदान करता है।
इनक्यूबेटर मोटर तंत्र अब अपनी दिशा को प्रवाहित करता है और एक रिवर्स मोशन शुरू करता है जब तक कि यह 'सेट' बिंदु तक नहीं पहुंच जाता है जो टी 4 के बेस ड्राइव को जल्दी से स्विच करता है, एसपीडीटी डीपीडीटी की पावर को काट देता है और पूरा तंत्र एक स्टैंड पर आता है ।
इस बीच आईसी 4060 की गिनती जारी है जब तक कि यह फिर से अपने पिन 3 पर उच्च तर्क के माध्यम से (सी 3 का निर्वहन करके) शून्य तर्क का उत्पादन नहीं किया है।
चक्र एक बार फिर से शुरू हो जाता है और ऊपर बताए अनुसार प्रक्रिया को दोहराता है।
पिछला: Arduino के साथ एक एलईडी निमिष - पूर्ण ट्यूटोरियल अगला: हाई पावर इंडस्ट्रियल मेन्स सर्ज सप्रेसर की खोज