पोस्ट एक गीगाहर्ट्ज माइक्रोवेव राडार सिक्योरिटी अलार्म सर्किट के बारे में बताती है जिसे महत्वपूर्ण ज़ोन के भीतर एक घुसपैठिए का पता लगाने के लिए डिज़ाइन किया गया है, जबकि यह गतिमान है, स्थैतिक ऑब्जेक्ट सेंसर के लिए कोई प्रभाव नहीं पैदा करते हैं।
डॉपलर सेंसर KMY24 का उपयोग करना
पिछले लेख में हमने एक के बारे में सीखा माइक्रोवेव डॉपलर रडार सेंसर मॉड्यूल KMY 24 यह एक हाई-एंड सेंसर डिवाइस है, जो सेट ज़ोन में एक सैंपल सिग्नल को ट्रांसमिट करने में सक्षम है, जब तक कि यह किसी मूविंग ऑब्जेक्ट से वापस नहीं आता है जो आवश्यक प्रोसेसिंग के लिए सेंसर से वापस आ जाता है।
निम्नलिखित चर्चा में हम देखेंगे कि यह मॉड्यूल कैसे पता लगाया जा सकता है कि एक संकेत या रिले चालक चरण जैसे उचित भार को पता लगाए गए और सक्षम फीड के लिए opamps के साथ धांधली की जा सकती है।
सर्किट आरेख

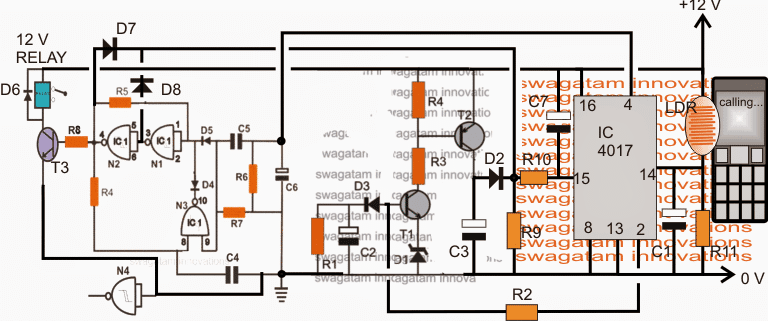
उपरोक्त गीगाहर्ट्ज माइक्रोवेव रडार सुरक्षा अलार्म सर्किट का उल्लेख करते हुए हम सेंसर मॉड्यूल KMY 24 को N1 और संबंधित घटकों का उपयोग करते हुए पहले opamp चरण के साथ कॉन्फ़िगर कर सकते हैं।
मूल रूप से N1 को एक अंतर त्रुटि एम्पलीफायर के रूप में वायर्ड किया जाता है, जिसमें इसके दो इनपुट सेंसर यूनिट के दो अंतर आउटपुट के साथ झुके होते हैं।
मूविंग ऑब्जेक्ट का पता लगाना
जब एक चलती हुई वस्तु या लक्ष्य सेंसर मॉड्यूल के सामने पाया जाता है तो परावर्तित GHz सिग्नल एक रिश्तेदार चरण शिफ्ट से होकर गुजरता है जो सेंसर पर वापस परिलक्षित होता है और मॉड्यूल के अंदर संसाधित होता है जो केंद्र के दो बराबर भागों में एक बराबर सकारात्मक या नकारात्मक प्रतिक्रिया उत्पन्न करता है। KMY 24 मॉड्यूल।
वोल्टेज में यह अंतर A1 के दो इनपुटों को खिलाया जाता है जो इस का पता लगाता है और इसके आउटपुट पिन # 1 पर एक बराबर मात्रा में अंतरित अंतर वोल्टेज उत्पन्न करता है।
A2 को एक फ़िल्टर चरण के रूप में कॉन्फ़िगर किया गया है जो A1 से आउटपुट की निगरानी करता है और अवांछित स्पाइक्स को फ़िल्टर करता है जो इसके इनपुट पर प्रेरित हो सकते हैं और अगले opamp N3 चरण में एक साफ प्रवर्धित अंतर सिग्नल फ़ीड करते हैं।
N3 एक प्रतिबाधा मिलान या ट्रांसफ़ॉर्मिंग चरण के रूप में जुड़ा हुआ है, जो N2 से फ़ेड किए गए अंतर इनपुट को संसाधित करता है और इसे अपने आउटपुट पिन # 8 में एक विशिष्ट उच्च या निम्न दालों में परिवर्तित करता है, जो कि डीसी अलार्म चरण, रिले के साथ उपयोग किए जाने के लिए संगत हो जाता है। ड्राइवर चरण या यहां तक कि एक माइक्रोकंट्रोलर इनपुट।
इस प्रकार GHz माइक्रोवेव राडार सेंसर अलार्म सर्किट को सेंसर के उत्सर्जक बिंदु से 6 मीटर की सीमा के भीतर एक घुसपैठिये से थोड़ी सी भी गति का पता लगाने के लिए एक सुरक्षा प्रणाली के रूप में इस्तेमाल किया जा सकता है, और एक अलार्म या किसी वांछित ट्रिगर आउटपुट में परिवर्तित हो सकता है।
पिछला: माइक्रोवेव सेंसर या एक डॉपलर सेंसर सर्किट अगला: Opamp का उपयोग करते हुए सरल अल्ट्रासोनिक साउंड सेंसर अलार्म सर्किट