पोस्ट व्यापक रूप से अपने ऑन-बोर्ड एलईडी को ब्लिंक करने के लिए एक मूल Arduino कोड कार्यान्वयन मार्गदर्शिका पर चर्चा करता है। डेटा का निर्माण, परीक्षण और जैक फ्रेंको द्वारा लिखा गया था।

कोड: डिफ़ॉल्ट रूप से ARDUINO बोर्ड के पिन 13 पर बस इनबिल्ट एलईडी के लिए इसे 50 मिली सेकेंड में बार-बार झपकाए जाने का प्रोग्राम है क्योंकि यह विवरण में इसे एसिम (मिलीसेकंड) कहा जाएगा।
/ * पहला सरल
JACKFRANKO द्वारा Arudino पर कार्यक्रम * /
int l = 13
//where l is pin 13void setup(){ pinMode
(l,OUTPUT) }void loop() { digitalWrite
(l,HIGH) delay(50) digitalWrite
(l,LOW) delay(50)}
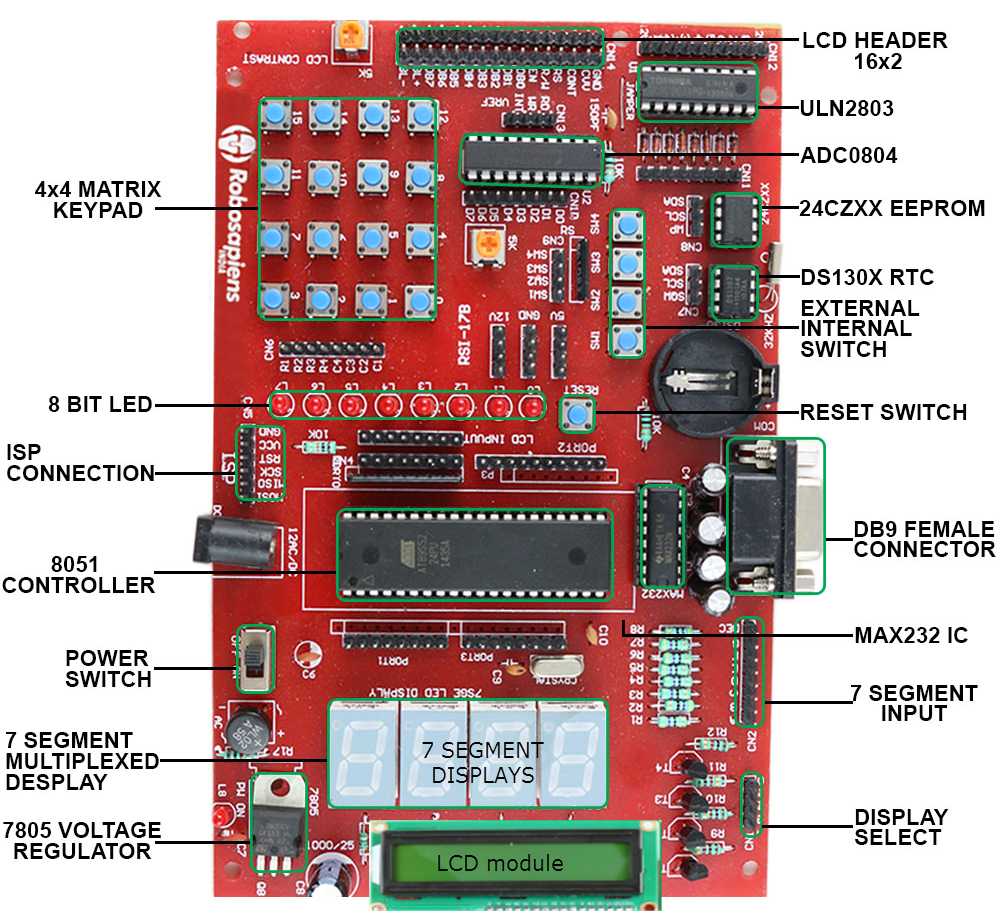
नोट: जैसा कि हम एक Arduino UNO R3 बोर्ड प्रोग्रामिंग का अध्ययन कर रहे हैं यदि आप एक प्रोग्रामर या डिजाइनर या एक शौक़ीन नहीं हैं, तो एक छात्र के रूप में आपको मूल बातें शुरू करनी चाहिए।
पहली बात यह है कि Arduino Uno R3 को एक किट प्राप्त करके समझना चाहिए जो ऑनलाइन दुकानों पर उपलब्ध है।
विवरण :
परंपरा के अनुसार, कार्यक्रम शुरू होने से पहले हमारा नाम प्राप्त करना एक अच्छा विचार है, यहाँ मेरा पहला मूल कार्यक्रम है जो ऊपर बताया गया है, इस संकेत / * और नाम के पाठ के साथ शुरू हुआ है और आप इसके बीच टाइप करना चाहते हैं। / जो प्रोग्राम को प्रभावित नहीं करता है और यह प्रोग्राम का हिस्सा नहीं है क्योंकि Arduino प्रोग्राम कंपाइलर जानता है कि '/ *, * /' मार्क के बीच सामान को छोड़ना चाहिए, यह प्रोग्राम के लिए सिर्फ शीर्षक है।
/ * पहला सरल
जैरफेंको द्वारा अरुडिनो पर कार्यक्रम * / अगली पंक्ति int l = 13
// जहां एल पिन 13 है
यह उस कार्यक्रम का एक घोषणा हिस्सा है, जहां हम पूर्णांक को कमांड के साथ घोषित करने जा रहे हैं 'int' जिसके बाद छोटे वर्णमाला L होता है जो 13 के बराबर होता है और अर्धविराम के साथ तब समाप्त होता है जब डबल स्लैश '//' और कुछ पाठ।
यहाँ हमने कमांड 'int' दिया है जिसे हम आमतौर पर पूर्णांक और छोटे L को 13 के बराबर कहते हैं और हम अर्धविराम के साथ समाप्त हुए यहाँ हमने संकलक से कहा कि मान 'l' 13 के बराबर है जो पिन नंबर पर स्थित है। Arduino बोर्ड पर तेरह, यहाँ 'l' सिर्फ एक वैल्यू है जिसे पिन नंबर 13 के लिए निर्दिष्ट किया गया है, कि 'l' कंपाइलर के लिए कोई फ़ंक्शन या स्क्रिप्ट नहीं है, यह हमारे लिए कोड को थोड़ा अनुकूल बनाने के लिए है कि 'l' में यह प्रोजेक्ट एलईडी के लिए छोटा है।
मैं कोड को थोड़ा छोटा करना चाहता हूं और कुछ स्थान बचाना चाहता हूं। इस बिंदु पर यदि आप इसे 'l' के रूप में नहीं रखना चाहते हैं, तो कहें कि आप इसे 'मुझे' के लिए रखना चाहते हैं, फिर पूरे कोड में जहां कभी भी 'l' है, आपको इसे 'मुझे' बदलना होगा अन्यथा संकलक काम नहीं करेगा और यह आपको त्रुटि देगा।
इस कथन में दूसरा भाग है, जिसके बाद '//' है और यहाँ कुछ पाठ हमें यह समझने की आवश्यकता है कि खोलने पर '//' के बाद जो भी कथन हैं और जिनका कोई समापन नहीं है, संकलक उस कथन को नहीं पढ़ेगा। यह बंद किए बिना कई लाइनों में हो सकता है। यह हमें समझने के लिए कोड में कुछ संदर्भ और नोट्स देने के लिए है।
कोड के बाकी हिस्से को समझने से पहले हमें कोड के बुनियादी कार्यों को समझना चाहिए और जो 'शून्य सेटअप' और 'शून्य लूप' हैं, यहाँ ये दो कार्य बहुत महत्वपूर्ण हैं क्योंकि हम अपने INPUT, OUTPUT और किस प्रकार के कार्य की घोषणा करने जा रहे हैं इसके द्वारा किया गया। तो चलिए शून्य सेटअप के साथ शुरू करते हैं, यह कोड का एक हिस्सा है, जहाँ हम अपने INPUTS & OUTPUTS को बताने जा रहे हैं, जो हमारे प्रोजेक्ट के लिए एक बार अवश्य चलना चाहिए। यहां हम अपने कोड के अनुसार केवल एक आउटपुट के बारे में बात करने जा रहे हैं।
अन्य फ़ंक्शन शून्य लूप कोड का दूसरा भाग है जो लूप के रूप में चलने वाला है। यहाँ इन दोनों फ़ंक्शंस में कर्व ब्रैकेट खुले और बंद हैं और फिर कर्ली ब्रैकेट ओपन होने के बाद कुछ कोड और कर्ली ब्रैकेट बंद रखें। मैं अगले कार्यक्रम में इन ब्रैकेट के बारे में जानकारी दूंगा। यहाँ हमें घुंघराले कोष्ठक पर ध्यान केन्द्रित करना है जहाँ हमारे पास इन कोष्ठकों के बीच कुछ कूट संलग्न है।
void setup(){ pinMode
(l,OUTPUT) }
यहां हमने फ़ंक्शन को बताया है जो एक बार हमारी परियोजना के लिए और हमारे आउटपुट के रूप में चलना चाहिए। यदि आपने देखा है कि हमने अपने कोड को घुंघराले ब्रैकेट में लिखा है, जहाँ हमने पिनमोड एल की घोषणा की है, जो वक्र ब्रैकेट में आउटपुट है और अर्धविराम के साथ समाप्त हो गया है,
यहां पिनकोड फ़ंक्शन को पूर्णांक l को OUTPUT के रूप में निर्दिष्ट किया गया है।
इसलिए l को arduino संकलक पर पिन नं 13 के लिए नामित किया गया है, यह समझेगा कि पिन नंबर 13 को l नहीं कहा जाता है और L को पिन नंबर 13 कहा जाता है यदि हम पिनमोड फ़ंक्शन के बाद l की जगह पर 13 डालते हैं
आउटपुट के रूप में यह 13 और एल दोनों पर विचार करेगा।
अगर हम int l = 13 को हटाते हैं तो यह वर्णमाला l पर विचार नहीं करेगा और यह आपको एक त्रुटि देगा। यहां हमने पिन सेट किया था
कोई 13 जो कि आउटपुट के रूप में वर्णमाला l है, इसे हमेशा बड़े अक्षर में लिखा जाता है क्योंकि OUTPUT और फंक्शन पिनमोड को पिनकोड में लिखा जाता है, जो बिना किसी छोटे अक्षर से शुरू होता है, अन्य शब्द मोड जो अपरकेस अक्षर से शुरू होता है जिसे कंपाइलर द्वारा समझा जाता है जो कि केस सेंसिटिव होता है।
इसके बाद हम अपने प्रोग्राम के लूप मोड पर आते हैं, हम उस सभी फंक्शन को कहते हैं जो लूप में चलना चाहिए
एक असीमित लंबे समय के लिए।
void loop() { digitalWrite
(l,HIGH) delay(50) digitalWrite
(l,LOW) delay(50)}
यहाँ हमने फंक्शन digitalWrite के साथ HIGH को l पूर्णांक घोषित किया था। यह कथन digitalWrite पूर्णांक l उच्च का अर्थ करेगा जब पर यह बदल जाएगा पर Arduino बोर्ड पर पिन नंबर 13, जैसा कि हमने कहा था कि पिन नंबर 13 एल नहीं है जो वक्र कोष्ठक में अल्पविराम द्वारा अलग किया गया है।
यहाँ हमने कहा कि देरी (50) के बाद यह कथन एमएस (मिलीसेकंड) में समय की गणना करेगा जहां 1000 मी 1 सेकंड के बराबर है। इस कार्यक्रम में मैं चाहता हूं कि मेरा नेतृत्व एक दूसरी गणितीय गणना में 20 बार फ्लैश करे
मुझे एक मान 50 दिया जो कोष्ठक में संलग्न है।
इसका मतलब यह है कि लूप सेक्शन के तहत पहली पंक्ति पिन नंबर 13 पर स्थित मेरी एलईडी को चालू करेगी और 5ms की प्रतीक्षा करेगी। अगर हम एलईडी बंद करने के लिए लूप को आगे का कार्य नहीं देते हैं तो यह चालू रहेगा।
हालांकि हमने कहा था कि 50ms के लिए देरी। इसलिए हमने LED को बंद करने का आदेश दिया है
में digitalWrite (l, LOW) , इस कथन को बताने के बाद LED बंद नहीं होगी क्योंकि लूप बिना अधूरा है देरी (50) पहले हम एलईडी चालू करते हैं, फिर हम 50ms की प्रतीक्षा करते हैं, फिर हम OFF को लीड करते हैं और फिर हम 50ms की प्रतीक्षा करते हैं ताकि एक लूप को पूरा किया जा सके जो तब तक चलने वाला है जब तक Arduino संचालित होता है। यह पिन नंबर पर अपना नेतृत्व चालू और बंद करेगा
13 प्रति सेकंड 20 बार।
पिछला: MOSFET का उपयोग करते हुए SPDT सॉलिड स्टेट DC रिले सर्किट अगला: इनक्यूबेटर रिवर्स फॉरवर्ड मोटर कंट्रोलर सर्किट