एक Arduino तीन चरण इन्वर्टर एक सर्किट है जो एक प्रोग्राम्ड Arduino आधारित थरथरानवाला के माध्यम से 3 चरण एसी आउटपुट का उत्पादन करता है।
इस पोस्ट में हम सीखते हैं कि एक साधारण माइक्रोप्रोसेसर Arduino आधारित 3 फेज इन्वर्टर सर्किट कैसे बनाया जाता है जिसे किसी दिए गए 3 फेज लोड के संचालन के लिए उपयोगकर्ता की पसंद के अनुसार अपग्रेड किया जा सकता है।

हम पहले से ही एक प्रभावी अभी तक सरल अध्ययन किया है 3 चरण इन्वर्टर सर्किट हमारे पहले के एक पोस्ट में जो 3 चरण वर्ग तरंग संकेतों को उत्पन्न करने के लिए opamps पर निर्भर करता था, जबकि 3 चरण पुश ड्रग्स सिग्नल को विशेष 3 चरण चालक आईसी का उपयोग करके लागू किया गया था।
वर्तमान अवधारणा में हम इन विशेष चालक आईसी का उपयोग करके मुख्य शक्ति चरण को भी कॉन्फ़िगर करते हैं, लेकिन 3 चरण सिग्नल जनरेटर को एक Arduino का उपयोग करके बनाया जाता है।
ऐसा इसलिए है क्योंकि एक Arduino आधारित 3 चरण ड्राइवर बनाना बेहद जटिल हो सकता है और इसकी सिफारिश नहीं की जाती है। इसके अलावा, बहुत सस्ती दरों पर इस उद्देश्य के लिए ऑफ-द-शेल्फ कुशल डिजिटल आईसी प्राप्त करना बहुत आसान है।
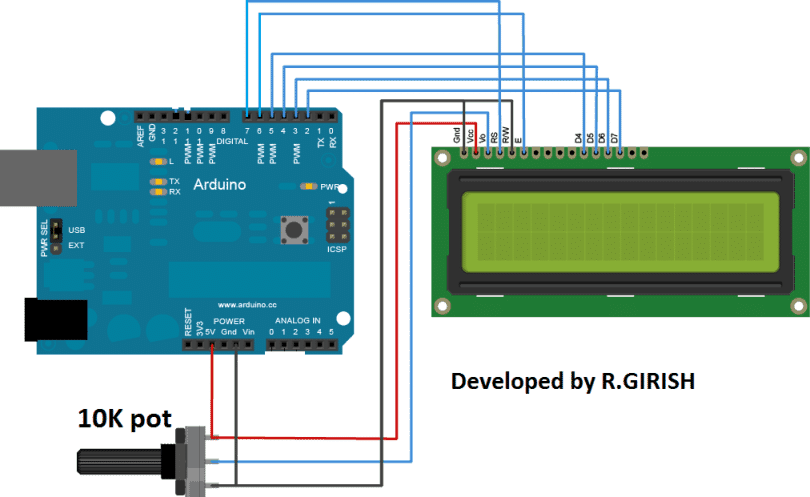
पूर्ण पलटनेवाला सर्किट के निर्माण से पहले, हमें पहले Arduino UNO बोर्ड के अंदर निम्नलिखित Arduino कोड प्रोग्राम करने की आवश्यकता है, और फिर बाकी विवरणों के साथ आगे बढ़ें।
Arduino 3 चरण सिग्नल जेनरेटर कोड
void setup() {
// initialize digital pin 13,12&8 as an output.
pinMode(13, OUTPUT)
pinMode(12,OUTPUT)
pinMode(8,OUTPUT)
}
void loop() {
int var=0
digitalWrite(13, HIGH)
digitalWrite(8,LOW)
digitalWrite(12,LOW)
delay(6.67)
digitalWrite(12,HIGH)
while(var==0){
delay(3.33)
digitalWrite(13,LOW)
delay(3.33)
digitalWrite(8,HIGH)
delay(3.34)
digitalWrite(12,LOW)
delay(3.33)
digitalWrite(13,HIGH)
delay(3.33)
digitalWrite(8,LOW)
delay(3.34)
digitalWrite(12,HIGH)
}
}
मूल स्रोत : http://forum.arduino.cc/index.php?topic=423907.0
उपरोक्त कोड का उपयोग करते हुए ग्रहण की गई तरंग की कल्पना निम्न चित्र में की जा सकती है:

एक बार जब आपने अपने Arduino में उपरोक्त कोड को जला दिया और पुष्टि की, तो यह आगे बढ़ने और शेष सर्किट चरणों को कॉन्फ़िगर करने का समय है।
इसके लिए आपको निम्नलिखित भागों की आवश्यकता होगी जो उम्मीद करते हैं कि आपने पहले ही खरीद लिए होंगे:
भागों की जरूरत है
आईसी IR2112 - 3 नग (या किसी भी समान 3 चरण चालक आईसी)
BC547 ट्रांजिस्टर - 3 नग
संधारित्र 10uF / 25V और 1uF / 25V = 3 नग प्रत्येक
100uF / 25V = 1no
1N4148 = 3nos (1N4148 1N4007 से अधिक अनुशंसित है)
प्रतिरोध, सभी 1/4 वाट 5%
100 ओम = 6nos
1K = 6nos
रचनात्मक विवरण
आरंभ करने के लिए, हम नीचे दिए गए अनुसार 3 चरण वाले मसिफेट चालक चरण को बनाने के लिए 3 आईसी से जुड़ते हैं:

एक बार ड्राइवर के बोर्ड को इकट्ठा करने के बाद, बीसी 547 ट्रांजिस्टर को आईसी के एचआईएन और लिन इनपुट के साथ जोड़ दिया जाता है, और निम्नलिखित आंकड़े में चित्रित किया गया है:

एक बार जब उपरोक्त डिज़ाइन का निर्माण किया जाता है, तो सिस्टम पर स्विच करके इच्छित परिणाम को जल्दी से सत्यापित किया जा सकता है।
याद रखें, Arduino को बूट करने के लिए कुछ समय की आवश्यकता होती है, इसलिए पहले Arduino को चालू करने की अनुशंसा की जाती है और फिर कुछ सेकंड के बाद ड्राइवर सर्किट पर + 12V की आपूर्ति चालू करें।
बूटस्ट्रैप कैपेसिटर की गणना कैसे करें
जैसा कि हम उपरोक्त आंकड़ों में देख सकते हैं, एक सर्किट को डायोड और कैपेसिटर के रूप में मस्जिद के पास बाहरी घटकों के एक जोड़े की आवश्यकता होती है। ये भाग उच्च पक्ष के मच्छरों के सटीक स्विचिंग को लागू करने में महत्वपूर्ण भूमिका निभाते हैं, और चरणों को बूटस्ट्रैपिंग नेटवर्क कहा जाता है।
हालांकि पहले से ही आरेख में दिया गया है इन संधारित्रों के मूल्यों को विशेष रूप से निम्नलिखित सूत्र का उपयोग करके गणना की जा सकती है:


बूटस्ट्रैप डायोड की गणना कैसे करें
उपरोक्त समीकरणों का उपयोग बूटस्ट्रैप नेटवर्क के संधारित्र मान की गणना के लिए किया जा सकता है, संबंधित डायोड के लिए हमें निम्नलिखित मानदंडों पर विचार करना होगा:
डायोड सक्रिय करते हैं या फॉरवर्ड पूर्वाग्रह मोड में सक्षम होते हैं जब उच्च पक्ष के मच्छरों को चालू किया जाता है और उनके चारों ओर की क्षमता लगभग पूरे पुल मस्जिद वोल्टेज लाइनों में बस के वोल्टेज के बराबर होती है, इसलिए बूटस्ट्रैप डायोड को सक्षम होने के लिए पर्याप्त दर्जा दिया जाना चाहिए। विशिष्ट आरेखों में निर्दिष्ट पूर्ण लागू वोल्टेज को अवरुद्ध करने के लिए।
यह समझने में काफी आसान लगता है, हालांकि वर्तमान रेटिंग की गणना के लिए, हमें स्विच चार्ज आवृत्ति के साथ गेट चार्ज परिमाण को गुणा करके कुछ गणित करना पड़ सकता है।
उदाहरण के लिए अगर मस्जिद IRF450 का उपयोग 100kHz की स्विचिंग आवृत्ति के साथ किया जाता है, तो डायोड के लिए वर्तमान रेटिंग 12mA होगी। चूंकि यह मान काफी न्यूनतम लगता है और अधिकांश डायोड में सामान्य रूप से इसकी तुलना में बहुत अधिक वर्तमान रेटिंग होती है, इसलिए विशेष ध्यान आवश्यक नहीं हो सकता है।
कहा जा रहा है कि, डायोड का अधिक तापमान रिसाव विशेषता पर विचार करने के लिए एक महत्वपूर्ण हो सकता है, खासकर उन स्थितियों में जहां बूटस्ट्रैप संधारित्र को अपने प्रभार को यथोचित निरंतर मात्रा में संग्रहीत करने के लिए माना जा सकता है। ऐसी परिस्थिति में, डायोड को अल्ट्रा फास्ट रिकवरी प्रकार होना चाहिए ताकि आईसी की आपूर्ति रेल की ओर बूटस्ट्रैप संधारित्र से वापस मजबूर होने से चार्ज की मात्रा को कम किया जा सके।
कुछ सुरक्षा उपाय
जैसा कि हम सभी जानते हैं कि 3 चरण के इन्वर्टर सर्किट में मच्छर ऐसी अवधारणाओं से जुड़े कई जोखिम भरे मापदंडों के कारण क्षति के लिए काफी संवेदनशील हो सकते हैं, खासकर जब प्रेरक भार का उपयोग किया जाता है। इस बारे में मैं पहले ही विस्तृत चर्चा कर चुका हूँ पहले के लेख , और यह कड़ाई से सलाह दी जाती है कि वह इस लेख को देखें और दिए गए दिशानिर्देशों के अनुसार मस्जिदों को लागू करें।
का उपयोग करते हुए आईसी IRS2330
निम्नलिखित आरेख को एक Arduino से 3 चरण PWM नियंत्रित इन्वर्टर के रूप में काम करने के लिए डिज़ाइन किया गया है।
पहला आरेख आईसी 4049 से छह नहीं गेट्स का उपयोग करके वायर्ड किया जाता है। इस चरण का उपयोग Arduino PWM दालों को पूरक उच्च / निम्न तर्क जोड़े में द्विभाजित करने के लिए किया जाता है ताकि एक पुल 3 चरण इन्वर्टर ड्राइवर आईसी आईसी IRS2330 खिलाया PWM के साथ संगत बनाया जा सकता है।


ऊपर से दूसरा आरेख प्रस्तावित अरुडिनो पीडब्लूएम के लिए पुल ड्राइवर चरण बनाता है, 3 चरण इन्वर्टर डिजाइन का उपयोग करते हुए आईसी IRS2330 पुल ड्राइवर चिप।
एचआईएन और लिन के रूप में संकेतित आईसी के इनपुट नॉट गेट्स से आयाम वाले अरुडिनो पीडब्लूएम को स्वीकार करते हैं और 6 आईजीबीटी द्वारा निर्मित आउटपुट ब्रिज नेटवर्क को ड्राइव करते हैं जो बदले में अपने तीन आउटपुट में कनेक्टेड लोड को ड्राइव करते हैं।
1K प्रीसेट का उपयोग पलटनेवाला की वर्तमान सीमा को नियंत्रित करने के लिए किया जाता है, इसे उपयुक्त रूप से I के शट डाउन पिन में समायोजित करके, 1 ओम संवेदी रोकनेवाला को उचित रूप से कम किया जा सकता है यदि वर्तमान में पलटनेवाला के लिए अपेक्षाकृत उच्च वर्तमान निर्दिष्ट किया जाता है।
ऊपर लपेटकर:
यह एक Arduino आधारित 3 चरण इन्वर्टर सर्किट का निर्माण करने के तरीके पर हमारी चर्चा का समापन करता है। यदि आपके पास इस विषय पर कोई और संदेह या प्रश्न हैं, तो कृपया बेझिझक टिप्पणी करें और उत्तर जल्दी प्राप्त करें।
पीसीबी Gerber फ़ाइलों और अन्य संबंधित फ़ाइलों के लिए आप निम्न लिंक का उल्लेख कर सकते हैं:
https://drive.google.com/file/d/1oAVsjNTPz6bOFaPOwu3OZPBIfDx1S3e6/view?usp=sharing
उपरोक्त विवरण 'द्वारा योगदान दिया गया था साइबरेक्स '
पिछला: लाउड पिस्टल साउंड सिम्युलेटर सर्किट अगला: ट्रांजिस्टर कॉमन कलेक्टर